Comments (39)
 bigwhite
commented on May 27, 2024
2
bigwhite
commented on May 27, 2024
2
I have met the same problems whatever in dev environment(bash docker/scripts/dev_start.sh) or release environment(bash docker/scripts/release_start.sh). After run the following command in apollo_release container:
/apollo# rosbag play docs/demo_guide/demo.bag --loop
[ INFO] [1499320503.064749970]: Opening docs/demo_guide/demo.bag
Waiting 0.2 seconds after advertising topics... done.
Hit space to toggle paused, or 's' to step.
[RUNNING] Bag Time: 1497125269.806705 Duration: 0.664225 / 41.613536
[RUNNING] Bag Time: 1497125270.017747 Duration: 0.875267 / 41.613536
[RUNNING] Bag Time: 1497125270.216592 Duration: 1.074112 / 41.613536
[RUNNING] Bag Time: 1497125270.407049 Duration: 1.264569 / 41.613536
[RUNNING] Bag Time: 1497125285.516865 Duration: 16.374386 / 41.613536
[RUNNING] Bag Time: 1497125285.697003 Duration: 16.554523 / 41.613536
[RUNNING] Bag Time: 1497125285.917519 Duration: 16.775039 / 41.613536
[RUNNING] Bag Time: 1497125286.076830 Duration: 16.934350 / 41.613536
[RUNNING] Bag Time: 1497125286.286546 Duration: 17.144066 / 41.613536
[RUNNING] Bag Time: 1497125309.316678 Duration: 40.174199 / 41.613536
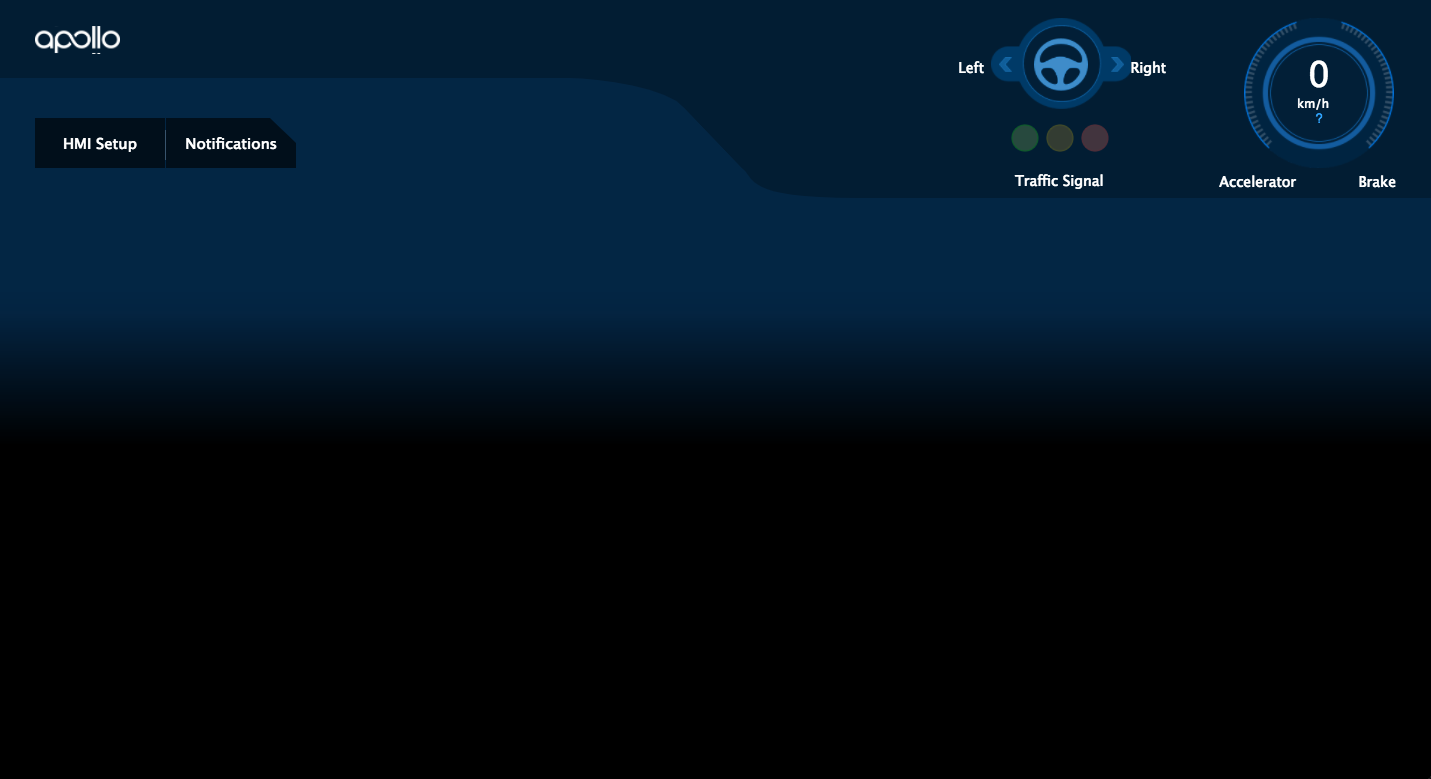
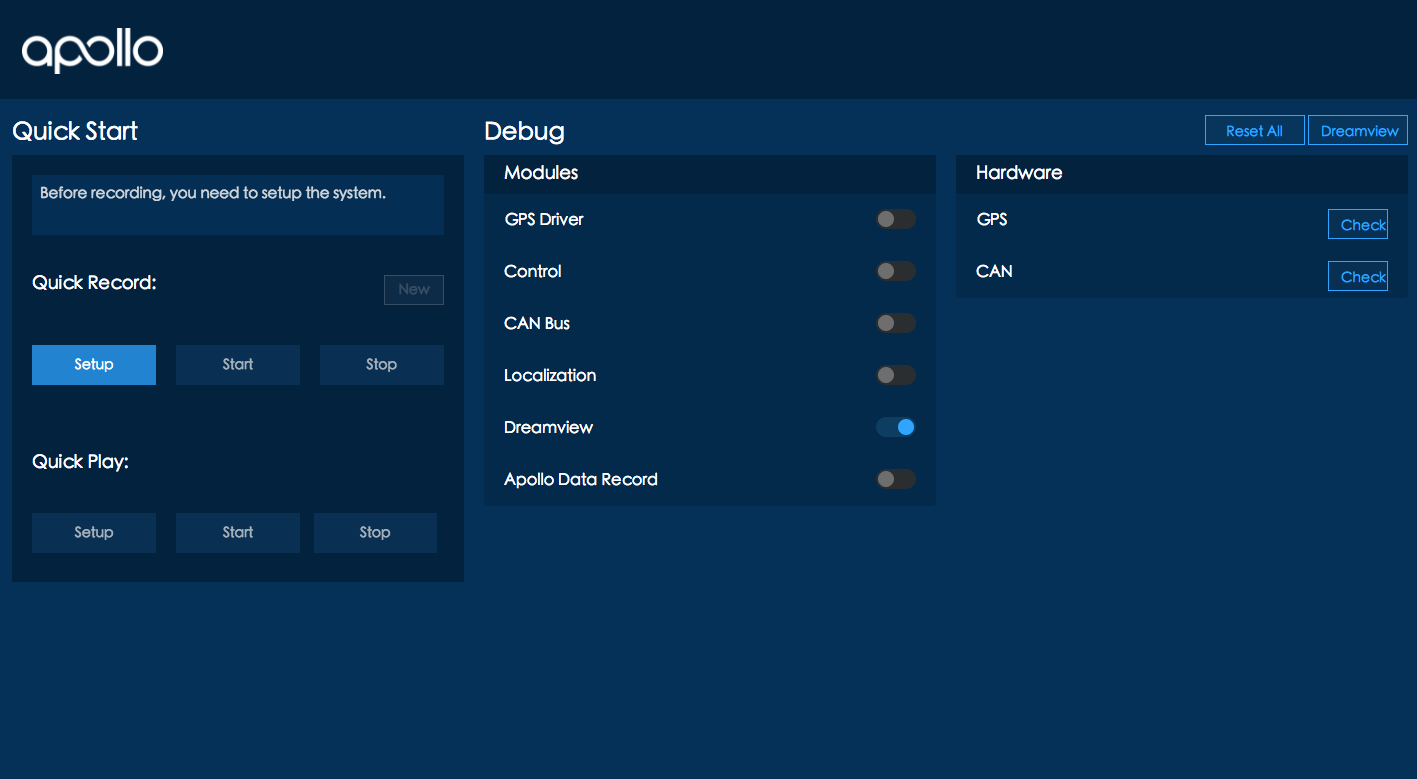
I can open the "HMI Setup" page and Dreamview page,but no vehicle or trajectory shows. the screen snapshot are below:
from apollo.
 tomzhang666
commented on May 27, 2024
tomzhang666
commented on May 27, 2024
I found out the problem. When I run the HMI, and rosnode list, there is none. thats why there's no image at all..but I dont know how to solve it yet.
from apollo.
 andrewraharjo
commented on May 27, 2024
andrewraharjo
commented on May 27, 2024
@tomzhang666 there are two bag files inside the docker. Did you try to run it ? I'm on the same boat with you. Still trying to figure what the problem is.
Did you successfully run bash docker/scripts/release_into.sh ?
Mine got an error not finding the bash: /opt/ros/indigo/setup.bash: No such file or directory
Any idea ?
from apollo.
tomzhang666
commented on May 27, 2024
thats not my problem.
your problem seems that you didn't install ros in your computer?
from apollo.
andrewraharjo
commented on May 27, 2024
@tomzhang666 got it working, permission issue again, just run the bash docker/scripts/release_into.sh as sudo
from apollo.
 Capri2014
commented on May 27, 2024
Capri2014
commented on May 27, 2024
@tomzhang666 Did you source /opt/ros/indigo/setup.bash in your bashrc?
from apollo.
tomzhang666
commented on May 27, 2024
Yes. And I can even run roscore in the docker, but nothing shows up when i
run rosnode list...
On Wed, Jul 5, 2017 at 2:09 AM Capri2014 ***@***.***> wrote:
@tomzhang666 <https://github.com/tomzhang666> Did you source
/opt/ros/indigo/setup.bash in your bashrc?
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
<#14 (comment)>,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/AVEmfTOCEzNgfxzOYsyLSua-vSSU3crGks5sK1K3gaJpZM4ON_8X>
.
--
*Zhengyu Zhang*
Master of Engineering Candidate (Experiential Advanced Control)
Department of Mechanical Engineering
Tel:(970)-889-7323
Email:[email protected]
LinkedIn: https://www.linkedin.com/in/zhengyu-zhang-163666102
-
from apollo.
Capri2014
commented on May 27, 2024
@tomzhang666 Sorry I mean you should not source your host computer /opt/ros/indigo/setup.bash, use the one under third_party in docker.
from apollo.
andrewraharjo
commented on May 27, 2024

Got it working @tomzhang666 try to run the rosbag play under root@in_release_docker. See hopefully it will work out. Also the browser I'm running is Chromium. Somehow I can't run it on Firefox. I'll do some digging later on.
from apollo.
tomzhang666
commented on May 27, 2024
@Capri2014 Can you specify the steps a bit more? I still didn't get it work. Its super weird, when I run hmi.sh, the command window told me that it start roscore, but when I try to check the rosnode list, there's nothing in it. Thats why I cannot see anything in my browser.
I think I have got this error because the docker setting? I am very new to docker, so any help would be very appreciated.
from apollo.
 ycool
commented on May 27, 2024
ycool
commented on May 27, 2024
@tomzhang666 After installing docker, do you logout and login again? Try docker ps without sudo. If it is not docker sudo problem, inside docker env, can you post the output of cat /apollo/meta.txt?
Thanks.
from apollo.
tomzhang666
commented on May 27, 2024
@ycool No such file exist
from apollo.
tomzhang666
commented on May 27, 2024
@ycool

this is my problem
from apollo.
 smilejx
commented on May 27, 2024
smilejx
commented on May 27, 2024
chrome browser is needed
from apollo.
tomzhang666
commented on May 27, 2024
Try chrome browser too. It doesn't work
On Wed, Jul 5, 2017 at 3:48 PM smilejx ***@***.***> wrote:
chrome browser is needed
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
<#14 (comment)>,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/AVEmfbKrPjsGTXrqmpFws3FRpjicPJa2ks5sLBKtgaJpZM4ON_8X>
.
--
*Zhengyu Zhang*
Master of Engineering Candidate (Experiential Advanced Control)
Department of Mechanical Engineering
Tel:(970)-889-7323
Email:[email protected]
LinkedIn: https://www.linkedin.com/in/zhengyu-zhang-163666102
-
from apollo.
ycool
commented on May 27, 2024
@tomzhang666 from your screen picture, you are using dev docker image. It need build from source code
bash /apollo/apollo.sh build # inside docker
The easier way to run demo is to follow the instruction at https://github.com/ApolloAuto/apollo/blob/master/docs/demo_guide/README.md
from apollo.
ycool
commented on May 27, 2024
@bigwhite in release docker, can you post the output of cat /apollo/meta.txt?
While rosbag is playing, in another terminal, insider release docker, can you help to post the output of rostopic list ?
from apollo.
 nypdmax
commented on May 27, 2024
nypdmax
commented on May 27, 2024
@tomzhang666 Probably you can just open a terminal and run that rosbag cmd.
For me that worked. However if I ran that cmd in docker, I would have some problems like no rosbag cmd can be found or (after I fixed it) some python dependencies were missing.
from apollo.
bigwhite
commented on May 27, 2024
# cat apollo/meta.txt
Git commit: 0264461
Build time: 20170704_1141
one terminal run the demo:
/apollo# rosbag play docs/demo_guide/demo.bag --loop
[ INFO] [1499349615.786847156]: Opening docs/demo_guide/demo.bag
Waiting 0.2 seconds after advertising topics... done.
Hit space to toggle paused, or 's' to step.
[RUNNING] Bag Time: 1497125297.452324 Duration: 28.309844 / 41.613536
on another terminal:
# docker exec 8d06c801cd4a /apollo/ros/bin/rostopic list
Traceback (most recent call last):
File "/apollo/ros/bin/rostopic", line 34, in <module>
import rostopic
File "/apollo/ros/lib/python2.7/dist-packages/rostopic/__init__.py", line 63, in <module>
import rosgraph
File "/apollo/ros/lib/python2.7/dist-packages/rosgraph/__init__.py", line 36, in <module>
from . masterapi import Master, MasterFailure, MasterError, MasterException
File "/apollo/ros/lib/python2.7/dist-packages/rosgraph/masterapi.py", line 49, in <module>
from rospy.impl.broadcast_manager import BroadcastManager
File "/apollo/ros/lib/python2.7/dist-packages/rospy/__init__.py", line 49, in <module>
from .client import spin, myargv, init_node, \
File "/apollo/ros/lib/python2.7/dist-packages/rospy/client.py", line 60, in <module>
import rospy.impl.init
File "/apollo/ros/lib/python2.7/dist-packages/rospy/impl/init.py", line 54, in <module>
from .tcpros import init_tcpros
File "/apollo/ros/lib/python2.7/dist-packages/rospy/impl/tcpros.py", line 45, in <module>
import rospy.impl.tcpros_service
File "/apollo/ros/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 65, in <module>
from broadcast_manager import BroadcastManager
File "/apollo/ros/lib/python2.7/dist-packages/rospy/impl/broadcast_manager.py", line 56, in <module>
for sub_path in env.split(':'):
AttributeError: 'NoneType' object has no attribute 'split'
from apollo.
ycool
commented on May 27, 2024
On another terminal, instead of running
$ docker exec 8d06c801cd4a /apollo/ros/bin/rostopic list, can you run following commands?
$ docker/scripts/release_into.sh
$ rostopic list # inside docker
Thanks.
from apollo.
bigwhite
commented on May 27, 2024
~/test/apolloauto/apollo-1.0.0# bash docker/scripts/release_into.sh
root@yypdmaster:/apollo# rostopic list
ERROR: Unable to communicate with master!
root@yypdmaster:/apollo#
from apollo.
ycool
commented on May 27, 2024
Can you run the following commands and post the output?
# while in another terminal, inside release docker, to rosbag play demo.bag
# inside release docker
$ roscore &
$ rostopic list
# out of docker
$ ps -ef | grep roscore
Thanks a lot.
from apollo.
bigwhite
commented on May 27, 2024
# inside release docker
root@yypdmaster:~/test/apolloauto/apollo-1.0.0# bash docker/scripts/release_into.sh
root@yypdmaster:/apollo#
root@yypdmaster:/apollo# roscore &
[1] 103
root@yypdmaster:/apollo# ... logging to /root/.ros/log/fee2a412-62ad-11e7-98c3-00163e1001d7/roslaunch-yypdmaster-103.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://yypdmaster:46069/
ros_comm version 1.11.21
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.21
NODES
auto-starting new master
process[master]: started with pid [121]
ROS_MASTER_URI=http://yypdmaster:11311/
setting /run_id to fee2a412-62ad-11e7-98c3-00163e1001d7
process[rosout-1]: started with pid [141]
started core service [/rosout]
root@yypdmaster:/apollo#
root@yypdmaster:/apollo#
root@yypdmaster:/apollo#
root@yypdmaster:/apollo#
root@yypdmaster:/apollo#
root@yypdmaster:/apollo#
root@yypdmaster:/apollo#
root@yypdmaster:/apollo# rostopic list
/apollo/canbus/chassis
/apollo/control
/apollo/control/pad
/apollo/localization/pose
/apollo/monitor
/apollo/planning
/apollo/sensor/gnss/corrected_imu
/apollo/sensor/gnss/gnss_status
/apollo/sensor/gnss/odometry
/clock
/rosout
/rosout_agg
# out of docker
root@yypdmaster:~# ps -ef | grep roscore
root 499 455 0 08:49 pts/4 00:00:00 grep --color=auto roscore
root 32762 32709 6 08:48 pts/3 00:00:03 /usr/bin/python /apollo/ros/bin/roscore
from apollo.
ycool
commented on May 27, 2024
Your rostopic list looks good. Your DreamView still shows nothing?
In your rosbag play terminal (inside docker),
bash scripts/env.sh >& env.txt
Can you post env.txt?
Thanks.
from apollo.
bigwhite
commented on May 27, 2024
there is still no car and trajectory in my Dreamview window.
There is no scripts/env.sh file in release docker container
/apollo# ll scripts
total 132
drwxr-xr-x 2 root root 4096 Jul 6 13:42 ./
drwxr-xr-x 15 root root 4096 Jul 7 11:54 ../
-rw-r--r-- 1 root root 3214 Jul 5 02:58 AGREEMENT.txt
-rwxr-xr-x 1 root root 5143 Jul 5 02:58 apollo_base.sh*
-rwxr-xr-x 1 root root 1306 Jul 5 02:58 apollo_init.sh*
-rwxr-xr-x 1 root root 1741 Jul 5 02:58 apollo_record.sh*
-rwxr-xr-x 1 root root 968 Jul 5 02:58 canbus.sh*
-rwxr-xr-x 1 root root 896 Jul 5 02:58 canbus_teleop.sh*
-rwxr-xr-x 1 root root 957 Jul 5 02:58 canbus_tester.sh*
-rwxr-xr-x 1 root root 955 Jul 5 02:58 control.sh*
-rwxr-xr-x 1 root root 942 Jul 5 02:58 control_info.sh*
-rwxr-xr-x 1 root root 972 Jul 5 02:58 decision.sh*
-rwxr-xr-x 1 root root 936 Jul 5 02:58 diagnostics.sh*
-rwxr-xr-x 1 root root 951 Jul 5 02:58 docker_adduser.sh*
-rwxr-xr-x 1 root root 880 Jul 5 02:58 docker_setup.sh*
-rwxr-xr-x 1 root root 973 Jul 5 02:58 dreamview.sh*
-rwxr-xr-x 1 root root 1443 Jul 5 02:58 gps.sh*
-rwxr-xr-x 1 root root 1446 Jul 5 02:58 gps_bj.sh*
-rwxr-xr-x 1 root root 1311 Jul 5 02:58 gps_sunnyvale.sh*
-rwxr-xr-x 1 root root 1750 Jul 5 02:58 hmi.sh*
-rwxr-xr-x 1 root root 1339 Jul 5 02:58 hw_check.sh*
-rwxr-xr-x 1 root root 960 Jul 5 02:58 localization.sh*
-rwxr-xr-x 1 root root 1158 Jul 5 02:58 pad.sh*
-rwxr-xr-x 1 root root 958 Jul 5 02:58 perception.sh*
-rwxr-xr-x 1 root root 956 Jul 5 02:58 planning.sh*
-rwxr-xr-x 1 root root 938 Jul 5 02:58 plot_trace.sh*
-rwxr-xr-x 1 root root 958 Jul 5 02:58 prediction.sh*
-rwxr-xr-x 1 root root 948 Jul 5 02:58 realtime_plot.sh*
-rwxr-xr-x 1 root root 1039 Jul 5 02:58 run_rtk_player.sh*
-rwxr-xr-x 1 root root 1133 Jul 5 02:58 run_rtk_recorder.sh*
-rwxr-xr-x 1 root root 814 Jul 5 02:58 stop_rtk_player.sh*
-rwxr-xr-x 1 root root 816 Jul 5 02:58 stop_rtk_recorder.sh*
but the env of the releases inside docker is below:
/apollo# env
HOSTNAME=yypdmaster
TERM=xterm
ROS_ROOT=/apollo/ros/share/ros
ROS_PACKAGE_PATH=/apollo/ros/share:/apollo/ros/stacks
ROS_MASTER_URI=http://localhost:11311
USER=root
LD_LIBRARY_PATH=/apollo/ros/lib:/apollo/lib:
LS_COLORS=rs=0:di=01;34:ln=01;36:mh=00:pi=40;33:so=01;35:do=01;35:bd=40;33;01:cd=40;33;01:or=40;31;01:su=37;41:sg=30;43:ca=30;41:tw=30;42:ow=34;42:st=37;44:ex=01;32:*.tar=01;31:*.tgz=01;31:*.arj=01;31:*.taz=01;31:*.lzh=01;31:*.lzma=01;31:*.tlz=01;31:*.txz=01;31:*.zip=01;31:*.z=01;31:*.Z=01;31:*.dz=01;31:*.gz=01;31:*.lz=01;31:*.xz=01;31:*.bz2=01;31:*.bz=01;31:*.tbz=01;31:*.tbz2=01;31:*.tz=01;31:*.deb=01;31:*.rpm=01;31:*.jar=01;31:*.war=01;31:*.ear=01;31:*.sar=01;31:*.rar=01;31:*.ace=01;31:*.zoo=01;31:*.cpio=01;31:*.7z=01;31:*.rz=01;31:*.jpg=01;35:*.jpeg=01;35:*.gif=01;35:*.bmp=01;35:*.pbm=01;35:*.pgm=01;35:*.ppm=01;35:*.tga=01;35:*.xbm=01;35:*.xpm=01;35:*.tif=01;35:*.tiff=01;35:*.png=01;35:*.svg=01;35:*.svgz=01;35:*.mng=01;35:*.pcx=01;35:*.mov=01;35:*.mpg=01;35:*.mpeg=01;35:*.m2v=01;35:*.mkv=01;35:*.webm=01;35:*.ogm=01;35:*.mp4=01;35:*.m4v=01;35:*.mp4v=01;35:*.vob=01;35:*.qt=01;35:*.nuv=01;35:*.wmv=01;35:*.asf=01;35:*.rm=01;35:*.rmvb=01;35:*.flc=01;35:*.avi=01;35:*.fli=01;35:*.flv=01;35:*.gl=01;35:*.dl=01;35:*.xcf=01;35:*.xwd=01;35:*.yuv=01;35:*.cgm=01;35:*.emf=01;35:*.axv=01;35:*.anx=01;35:*.ogv=01;35:*.ogx=01;35:*.aac=00;36:*.au=00;36:*.flac=00;36:*.mid=00;36:*.midi=00;36:*.mka=00;36:*.mp3=00;36:*.mpc=00;36:*.ogg=00;36:*.ra=00;36:*.wav=00;36:*.axa=00;36:*.oga=00;36:*.spx=00;36:*.xspf=00;36:
CPATH=/apollo/ros/include
ROS_DOMAIN_ID=21791177
PATH=/apollo/ros/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin
PWD=/apollo
ROSLISP_PACKAGE_DIRECTORIES=
DOCKER_USER_ID=0
DOCKER_USER=root
SHLVL=1
HOME=/root
ROS_DISTRO=indigo
PYTHONPATH=/apollo/lib:/apollo/lib:/apollo/ros/lib/python2.7/dist-packages
RELEASE_DOCKER=1
PKG_CONFIG_PATH=/apollo/ros/lib/pkgconfig
LESSOPEN=| /usr/bin/lesspipe %s
CMAKE_PREFIX_PATH=/apollo/ros
DISPLAY=:0
LESSCLOSE=/usr/bin/lesspipe %s %s
ROS_ETC_DIR=/apollo/ros/etc/ros
_=/usr/bin/env
from apollo.
ycool
commented on May 27, 2024
Noticed several things are not right.
- user (root) is wrong, normally
docker/scripts/release_start.shanddocker/scripts/release_into.shwill keep your normal user id. - inside release docker, the hostname (
yypdmaster) is wrong. Normally it will be changed toin_release_docker.
Do you have any local modification for the scripts? Does docker ps without sudo work for you?
Can you pull the latest code and rerun the following command out of docker?
bash scripts/env.sh >& env.txt
Thanks.
from apollo.
bigwhite
commented on May 27, 2024
@ycool the only user I use on my host is "root". "root" is my normal user id.
I haven't change any source code locally. All code are from apollo-v1.0.0 release.
from apollo.
ycool
commented on May 27, 2024
Ok. Let's try everything again from scratch.
1. reboot your machine
2. cd YOUR_APOLLO_DIR
3. docker ps # to verify docker works
4. docker/scripts/release_start.sh
5. docker/scripts/release_into.sh
# all following commands run inside one same release docker terminal
$ scripts/hmi.sh stop
$ scripts/hmi.sh
# start DreamView from HMI (http://localhost:8887)
$ rosbag play -l docs/demo_guide/demo.bag &
$ rostopic list
# Open a browser at http://localhost:8888 and check
# if dreamview still doesn't show anything
$ rostopic echo /apollo/localization/pose (You can ctrl-C after ~10 seconds)
Can you update us if any progress? Thanks a lot.
from apollo.
 GoLancer
commented on May 27, 2024
GoLancer
commented on May 27, 2024
You can try to set environment ROS_IP before start all these nodes.
export ROS_IP=127.0.0.1Thanks.
from apollo.
bigwhite
commented on May 27, 2024
@ycool I forgot to say that my environment is Aliyun ECS ubuntu 16.04.1 LTS. Is this OK for apollo installation and later experiments?
from apollo.
bigwhite
commented on May 27, 2024
I tried again from scratch according to @ycool 's steps, but I still could not see the vehicle and trajectory in my Dreamview window.
1. reboot your machine
done
2. cd YOUR_APOLLO_DIR
cd ~/test/apolloauto/apollo-1.0.0
root@yypdmaster:~/test/apolloauto/apollo-1.0.0
3. docker ps # to verify docker works
root@yypdmaster:~/test/apolloauto/apollo-1.0.0# docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
4da99336163e gcr.io/google_containers/k8s-dns-sidecar-amd64@sha256:d33a91a5d65c223f410891001cd379ac734d036429e033865d700a4176e944b0 "/sidecar --v=2 --log" 30 hours ago Up 30 hours
... ...
4. docker/scripts/release_start.sh
root@yypdmaster:~/test/apolloauto/apollo-1.0.0# docker/scripts/release_start.sh
APOLLO_ROOT_DIR=/root/test/apolloauto/apollo-1.0.0
release-latest: Pulling from apolloauto/apollo
5d890c53be21: Already exists
f775b856e199: Already exists
552c4f407d99: Already exists
fda304b96f8a: Already exists
2b033adb904a: Already exists
df7ba7eb2dd0: Pull complete
087776164dbd: Extracting [========================> ] 249.6 MB/515.3 MB
087776164dbd: Extracting [========================> ] 255.1 MB/515.3 MB
087776164dbd: Pull complete
......
Digest: sha256:5a159e607272e8465fb3be394a6ea342b6c79fc75ec65f7bc8fe57003d0f0ba7
Status: Downloaded newer image for apolloauto/apollo:release-latest
Error response from daemon: No such container: apollo_release
Error response from daemon: No such container: apollo_release
mknod: /dev/can0: File exists
/root/test/apolloauto/apollo-1.0.0/data/core/core_%e.%p
[WARNING] Failed to find device with pattern "ttyUSB*" ...
[ OK ] Found device: /dev/ttyS31.
[ OK ] Found device: /dev/ttyS30.
[ OK ] Found device: /dev/ttyS29.
[ OK ] Found device: /dev/ttyS28.
[ OK ] Found device: /dev/ttyS27.
[ OK ] Found device: /dev/ttyS26.
[ OK ] Found device: /dev/ttyS25.
[ OK ] Found device: /dev/ttyS24.
[ OK ] Found device: /dev/ttyS23.
[ OK ] Found device: /dev/ttyS22.
[ OK ] Found device: /dev/ttyS21.
[ OK ] Found device: /dev/ttyS20.
[ OK ] Found device: /dev/ttyS19.
[ OK ] Found device: /dev/ttyS18.
[ OK ] Found device: /dev/ttyS17.
[ OK ] Found device: /dev/ttyS16.
[ OK ] Found device: /dev/ttyS15.
[ OK ] Found device: /dev/ttyS14.
[ OK ] Found device: /dev/ttyS13.
[ OK ] Found device: /dev/ttyS12.
[ OK ] Found device: /dev/ttyS11.
[ OK ] Found device: /dev/ttyS10.
[ OK ] Found device: /dev/ttyS9.
[ OK ] Found device: /dev/ttyS8.
[ OK ] Found device: /dev/ttyS7.
[ OK ] Found device: /dev/ttyS6.
[ OK ] Found device: /dev/ttyS5.
[ OK ] Found device: /dev/ttyS4.
[ OK ] Found device: /dev/ttyS3.
[ OK ] Found device: /dev/ttyS2.
[ OK ] Found device: /dev/ttyS1.
[ OK ] Found device: /dev/ttyS0.
[ OK ] Found device: /dev/can0.
[WARNING] Failed to find device with pattern "ram*" ...
[ OK ] Found device: /dev/loop7.
[ OK ] Found device: /dev/loop6.
[ OK ] Found device: /dev/loop5.
[ OK ] Found device: /dev/loop4.
[ OK ] Found device: /dev/loop3.
[ OK ] Found device: /dev/loop2.
[ OK ] Found device: /dev/loop1.
[ OK ] Found device: /dev/loop0.
[ OK ] Found device: /dev/loop-control.
589c4eb50caa606a2df912d9552b3a58c7fcbf2445437d369d39dd3ed808910e
adduser: The user `root' already exists.
adduser: The user `root' already exists.
THE APOLLO OPEN PLATFORM (“PLATFORM”) FOR AND ON BEHALF OF ITSELF AND ITS SUBSIDIARIES AND AFFILIATES UNDER COMMON CONTROL, IS WILLING TO LICENSE THE SOFTWARE TO YOU ONLY UPON THE CONDITION THAT YOU ACCEPT ALL OF THE TERMS CONTAINED IN THIS LICENSE AGREEMENT ("AGREEMENT"). PLEASE READ THE AGREEMENT CAREFULLY. BY SELECTING THE "ACCEPT LICENSE AGREEMENT" (OR THE EQUIVALENT) BUTTON AND/OR BY USING THE SOFTWARE YOU ACKNOWLEDGE THAT YOU HAVE READ THE TERMS AND AGREE TO THEM. IF YOU ARE AGREEING TO THESE TERMS ON BEHALF OF A COMPANY OR OTHER LEGAL ENTITY, YOU REPRESENT THAT YOU HAVE THE LEGAL AUTHORITY TO BIND THE LEGAL ENTITY TO THESE TERMS. IF YOU DO NOT HAVE SUCH AUTHORITY, OR IF YOU DO NOT WISH TO BE BOUND BY THE TERMS, THEN SELECT THE "DECLINE LICENSE AGREEMENT" (OR THE EQUIVALENT) BUTTON AND YOU MUST NOT USE THE SOFTWARE ON THIS SITE OR ANY OTHER MEDIA ON WHICH THE SOFTWARE IS CONTAINED.
1. DEFINITIONS. "Software" means the software identified above in binary form that you selected for download, install or use (in the version You selected for download, install or use) from Baidu or its authorized licensees, any other machine readable materials (including, but not limited to, libraries, source files, header files, and data files), any updates or error corrections provided by Baidu, and any user manuals, programming guides and other documentation provided to you by Baidu under this Agreement.
2. LICENSE GRANT: Subject to the terms and conditions of this Agreement, with the exception of different license terms and license grants for separate, individual third-party components as set forth below, the Software is licensed to you under the terms of the Apache 2.0 license available at: https://www.apache.org/licenses/LICENSE-2.0. You agree to these terms with respect to the Software.
3. THIRD PARTY CODE: Additional copyright notices and license terms applicable to portions of the Software are set forth below in Appendix A. You expressly agree to the license terms associated with third party code set forth in Appendix A. In addition to any terms and conditions of any third party license identified in Appendix A, the disclaimer of warranty and limitation of liability provisions in paragraphs 4 and 5 of this License Agreement shall apply to all Software in this distribution. YOU EXPRESSLY AGREE THAT YOU HAVE REVIEWED THE TERMS OF THE AGREEMENTS LINKED TO AND RESTATED IN APPENDIX A TO THIS AGREEMENT, AND THAT YOU AGREE TO THE TERMS OF THOSE AGREEMENTS.
4. DISCLAIMER OF WARRANTY. THE SOFTWARE IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND. BAIDU FURTHER DISCLAIMS ALL WARRANTIES, EXPRESS AND IMPLIED, INCLUDING WITHOUT LIMITATION, ANY IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE OR NONINFRINGEMENT.
5. LIMITATION OF LIABILITY. IN NO EVENT SHALL BAIDU BE LIABLE FOR ANY INDIRECT, INCIDENTAL, SPECIAL, PUNITIVE OR CONSEQUENTIAL DAMAGES, OR DAMAGES FOR LOSS OF PROFITS, REVENUE, DATA OR DATA USE, INCURRED BY YOU OR ANY THIRD PARTY, WHETHER IN AN ACTION IN CONTRACT OR TORT, EVEN IF BAIDU HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. BAIDU’S ENTIRE LIABILITY FOR DAMAGES HEREUNDER SHALL IN NO EVENT EXCEED ONE ONE CENT (U.S. $0.01).
Type 'y' or 'Y' to agree to the license agreement above, or type any other key to exit
y
the start process seems hangs after I enter 'y', but the container has started. I don't know whether it is a problem.
5. docker/scripts/release_into.sh
root@yypdmaster:~/test/apolloauto/apollo-1.0.0# docker/scripts/release_into.sh
root@yypdmaster:/apollo#
6. # scripts/hmi.sh stop
THE APOLLO OPEN PLATFORM (“PLATFORM”) FOR AND ON BEHALF OF ITSELF AND ITS SUBSIDIARIES AND AFFILIATES UNDER COMMON CONTROL, IS WILLING TO LICENSE THE SOFTWARE TO YOU ONLY UPON THE CONDITION THAT YOU ACCEPT ALL OF THE TERMS CONTAINED IN THIS LICENSE AGREEMENT ("AGREEMENT"). PLEASE READ THE AGREEMENT CAREFULLY. BY SELECTING THE "ACCEPT LICENSE AGREEMENT" (OR THE EQUIVALENT) BUTTON AND/OR BY USING THE SOFTWARE YOU ACKNOWLEDGE THAT YOU HAVE READ THE TERMS AND AGREE TO THEM. IF YOU ARE AGREEING TO THESE TERMS ON BEHALF OF A COMPANY OR OTHER LEGAL ENTITY, YOU REPRESENT THAT YOU HAVE THE LEGAL AUTHORITY TO BIND THE LEGAL ENTITY TO THESE TERMS. IF YOU DO NOT HAVE SUCH AUTHORITY, OR IF YOU DO NOT WISH TO BE BOUND BY THE TERMS, THEN SELECT THE "DECLINE LICENSE AGREEMENT" (OR THE EQUIVALENT) BUTTON AND YOU MUST NOT USE THE SOFTWARE ON THIS SITE OR ANY OTHER MEDIA ON WHICH THE SOFTWARE IS CONTAINED.
1. DEFINITIONS. "Software" means the software identified above in binary form that you selected for download, install or use (in the version You selected for download, install or use) from Baidu or its authorized licensees, any other machine readable materials (including, but not limited to, libraries, source files, header files, and data files), any updates or error corrections provided by Baidu, and any user manuals, programming guides and other documentation provided to you by Baidu under this Agreement.
2. LICENSE GRANT: Subject to the terms and conditions of this Agreement, with the exception of different license terms and license grants for separate, individual third-party components as set forth below, the Software is licensed to you under the terms of the Apache 2.0 license available at: https://www.apache.org/licenses/LICENSE-2.0. You agree to these terms with respect to the Software.
3. THIRD PARTY CODE: Additional copyright notices and license terms applicable to portions of the Software are set forth below in Appendix A. You expressly agree to the license terms associated with third party code set forth in Appendix A. In addition to any terms and conditions of any third party license identified in Appendix A, the disclaimer of warranty and limitation of liability provisions in paragraphs 4 and 5 of this License Agreement shall apply to all Software in this distribution. YOU EXPRESSLY AGREE THAT YOU HAVE REVIEWED THE TERMS OF THE AGREEMENTS LINKED TO AND RESTATED IN APPENDIX A TO THIS AGREEMENT, AND THAT YOU AGREE TO THE TERMS OF THOSE AGREEMENTS.
4. DISCLAIMER OF WARRANTY. THE SOFTWARE IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND. BAIDU FURTHER DISCLAIMS ALL WARRANTIES, EXPRESS AND IMPLIED, INCLUDING WITHOUT LIMITATION, ANY IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE OR NONINFRINGEMENT.
5. LIMITATION OF LIABILITY. IN NO EVENT SHALL BAIDU BE LIABLE FOR ANY INDIRECT, INCIDENTAL, SPECIAL, PUNITIVE OR CONSEQUENTIAL DAMAGES, OR DAMAGES FOR LOSS OF PROFITS, REVENUE, DATA OR DATA USE, INCURRED BY YOU OR ANY THIRD PARTY, WHETHER IN AN ACTION IN CONTRACT OR TORT, EVEN IF BAIDU HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. BAIDU’S ENTIRE LIABILITY FOR DAMAGES HEREUNDER SHALL IN NO EVENT EXCEED ONE ONE CENT (U.S. $0.01).
Type 'y' or 'Y' to agree to the license agreement above, or type any other key to exit
yroot@yypdmaster:/apollo#
7. scripts/hmi.sh
scripts/hmi.sh
# start DreamView from HMI (http://localhost:8887)
root@yypdmaster:/apollo# scripts/hmi.sh
Start roscore...
HMI ros node service running at localhost:8887
HMI running at http://localhost:8887
8.
$ rosbag play -l docs/demo_guide/demo.bag &
root@yypdmaster:/apollo# rosbag play -l docs/demo_guide/demo.bag &
[1] 396
root@yypdmaster:/apollo# [ INFO] [1499415621.261867192]: Opening docs/demo_guide/demo.bag
[1]+ Stopped rosbag play -l docs/demo_guide/demo.bag
root@yypdmaster:/apollo#
root@yypdmaster:/apollo#
root@yypdmaster:/apollo# ps aux|grep rosbag
root 396 1.7 0.3 95504 24952 ? T 16:20 0:00 /usr/bin/python /apollo/ros/bin/rosbag play -l docs/demo_guide/demo.bag
root 399 1.2 0.2 747144 21712 ? Tl 16:20 0:00 /apollo/ros/lib/rosbag/play --loop --queue 100 --rate 1.0 --delay 0.2 --start 0.0 docs/demo_guide/demo.bag
9.
$ rostopic list
root@yypdmaster:/apollo# rostopic list
/apollo/canbus/chassis
/apollo/control/pad
/clock
/rosout
/rosout_agg
10.
root@yypdmaster:/apollo# rostopic echo /apollo/localization/pose
/use_sim_time is not set, will not subscribe to simulated time [/clock] topic
from apollo.
GoLancer
commented on May 27, 2024
[1]+ Stopped rosbag play -l docs/demo_guide/demo.bag
Rosbag play failed in the background.
It seems everything else is OK. Can you play bag again and check if dreamview works?
rosbag play docs/demo_guide/demo.bag -l (not in background)
Thanks
from apollo.
bigwhite
commented on May 27, 2024
I tried again, but dreamview was still not normal .
root@yypdmaster:/apollo# scripts/hmi.sh
Start roscore...
HMI ros node service running at localhost:8887
HMI running at http://localhost:8887
root@yypdmaster:/apollo#
root@yypdmaster:/apollo# rosbag play docs/demo_guide/demo.bag -l
[ INFO] [1499435572.740414143]: Opening docs/demo_guide/demo.bag
Waiting 0.2 seconds after advertising topics... done.
Hit space to toggle paused, or 's' to step.
[RUNNING] Bag Time: 1497125306.146474 Duration: 37.003994 / 41.613536
another terminal:
root@yypdmaster:/apollo# rostopic list
/apollo/canbus/chassis
/apollo/control
/apollo/control/pad
/apollo/localization/pose
/apollo/monitor
/apollo/planning
/apollo/sensor/gnss/corrected_imu
/apollo/sensor/gnss/gnss_status
/apollo/sensor/gnss/odometry
/clock
/rosout
/rosout_agg
root@yypdmaster:/apollo# rostopic echo /apollo/localization/pose
/use_sim_time is not set, will not subscribe to simulated time [/clock] topic
header {
timestamp_sec: 1497125309.87
module_name: "localization"
sequence_num: 64970
}
pose {
position {
x: 586361.89427
y: 4140759.67539
z: -29.3274102081
}
orientation {
qx: -0.022697063464
qy: -0.0539189188158
qz: -0.139600811996
qw: 0.988478227779
}
linear_velocity {
x: 0.0789115256896
y: 0.295165496089
z: 0.001329204289
}
linear_acceleration {
x: -0.0839405352258
y: -0.427550813181
z: 0.0185564555196
}
angular_velocity {
x: 0.00696304487913
y: 0.00319024881022
z: -0.00115117317356
}
heading: 1.28850586683
linear_acceleration_vrf {
x: 0.0388659133791
y: -0.434370804554
z: 0.00122404060012
}
... ...
from apollo.
ycool
commented on May 27, 2024
In your another terminal: (inside release docker which did rostopic list)
$ scripts/dreamview.sh stop
$ scripts/dreamview.sh
Both your rostopic list and rostopic echo contents are correct. It is very close now :)
from apollo.
bigwhite
commented on May 27, 2024
I restart the dreamview module,but it still not works.
root@yypdmaster:/apollo# scripts/dreamview.sh stop
Successfully stopped module dreamview.
root@yypdmaster:/apollo# scripts/dreamview.sh
Launched module dreamview.
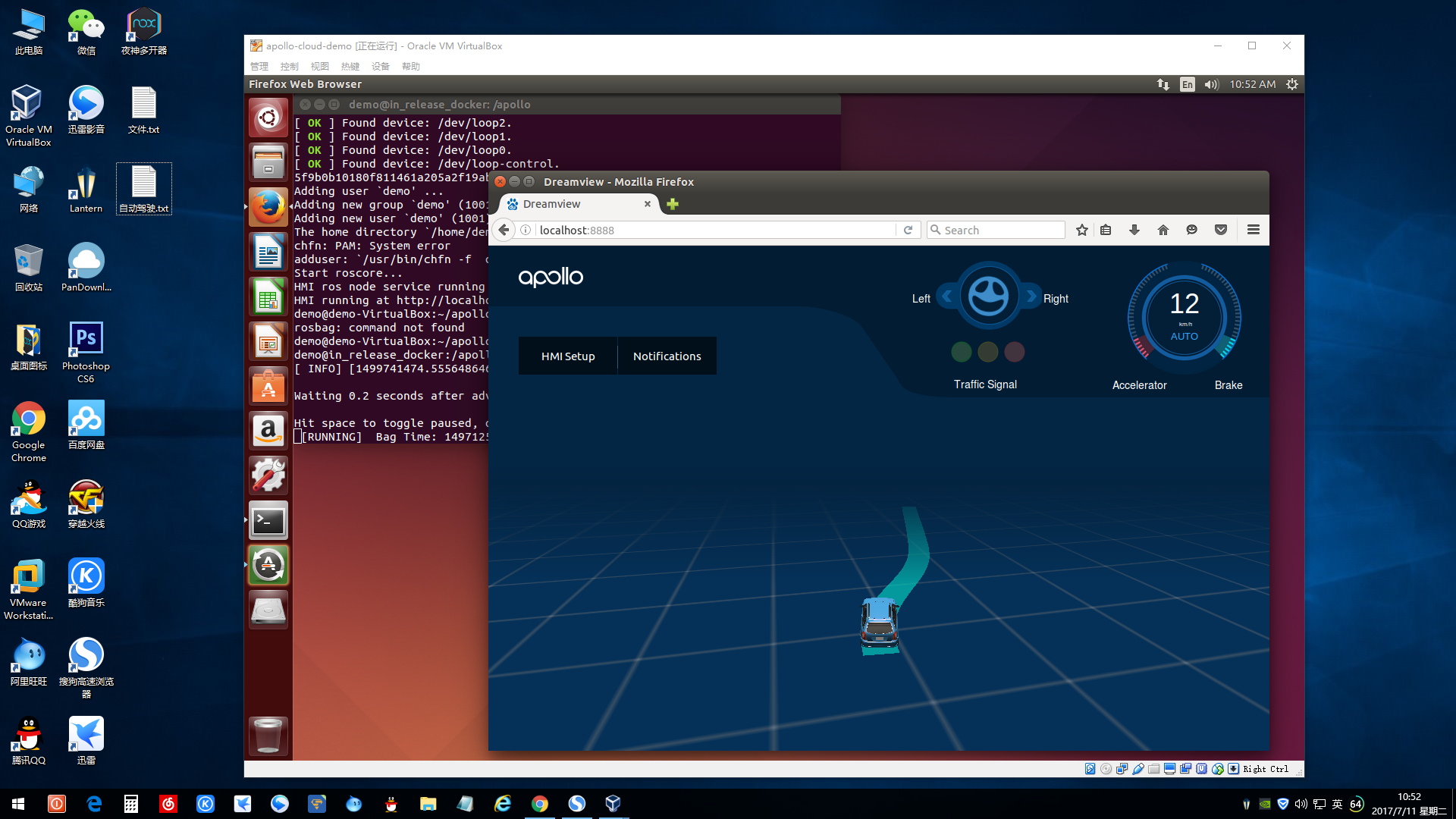
I'm wondering whether the problem is related to the chrome browser's version. My chrome is 59.0.3071.115(64bit) on Mac OS. If I use another chrome browser(version:52.0.2743.116 m) running on windows in my virtualbox vm, I got worse result - Only background color can be displayed and nothing else can be seen.
from apollo.
ycool
commented on May 27, 2024
@bigwhite I think Chrome version is ok. (Mine is Version 58.0.3029.110 (64-bit))
Is it possible to temporarily login your Aliyun ECS ubuntu 16.04.1 LTS instance? If so, can you send the info to [email protected]? (If you want to join the realtime debug, send your wechat ID and some possible time slots)
Thank a lot for your patience.
from apollo.
bigwhite
commented on May 27, 2024
@ycool I have sent you an email, pls check.
from apollo.
 lgslgs88888
commented on May 27, 2024
lgslgs88888
commented on May 27, 2024
from apollo.
bigwhite
commented on May 27, 2024
With the help of @ycool, my problem has been solved. The reason is that the websocket server port:8889 which dreamview use has been blocked by aliyun ECS firewall. After reconfiging the firewall, the vehicle and trajectory finally appear.
from apollo.
Related Issues (20)
- The lane direction of Apollo HD map created by Roadrunner
- start dreamview+ error
- Potential Errors untrusted-data-to-external-api Related to CWE-20
- Potential Error uncontrolled-allocation-size Related to CWE-190
- [BUG] Missing package management related build scripts?
- What is map engine, what does it do, and how it do it? HOT 2
- Singularity support HOT 4
- What is the problem in my local map which is needed to use msf localization?
- Questions about adding Scenario
- Potential Errors command-line-injection Related to CWE-78 in hmi_worker.cc
- Potential Errors command-line-injection Related to CWE-78 in dynamic_model_factory.cc
- Potential Errors overrunning-write-with-float Related to CWE-120
- [Prediction module] Why history_size needs saturating when judging obstacle's motion status?
- "Header Flag not match" when sending UDP data
- 有没有尝试过把ftps换成最新的dds,本人已完成替换和编译,运行时,服务发现出现了问题,有人搞过的话,希望可以交流一下 HOT 2
- Error in build apollo.sh about '@centerpoint_infer_op'
- Apollo Studio任务评测结果为编译错误
- Camera Perception with SMOKE detector with high CPU usage even on GPU mode. HOT 1
- v-8.0.0 dreamview 无法同步场景并且routing模块的按钮找不到且无法打开......配置一个月了都没成功 HOT 5
- buildtool编译问题
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from apollo.