Comments (13)
 osrf-migration
commented on August 20, 2024
osrf-migration
commented on August 20, 2024
Original comment by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
- changed title from "The ocean reflects the laser beams." to "The ocean reflects the laser beams"
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
- changed milestone from "0.3" to "0.5"
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare).
Hi Carlos,
I have been looking at this and the linked issue. If you want an example of the behavior of a velodyne on the water, the lidar data in the following image was accumulated from several scans of an artificial lake. The sensor was an HDL-32 mounted on a WAM-V. The top of the image includes trees and a beach, the bottom is the water surface. Note that in this image, the velodyne produces only a very few returns from the water surface.
A connected issue may be that the GPU velodyne implementation does not currently support variable reflectivity. A bug has been filed about this on the dataspeed bitbucket.
If the bug is resolved, it may be possible to create the expected behaviour by setting the oceans laser_retro value to zero.
Regards,
Jonathan.
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare).
HI Carlos,
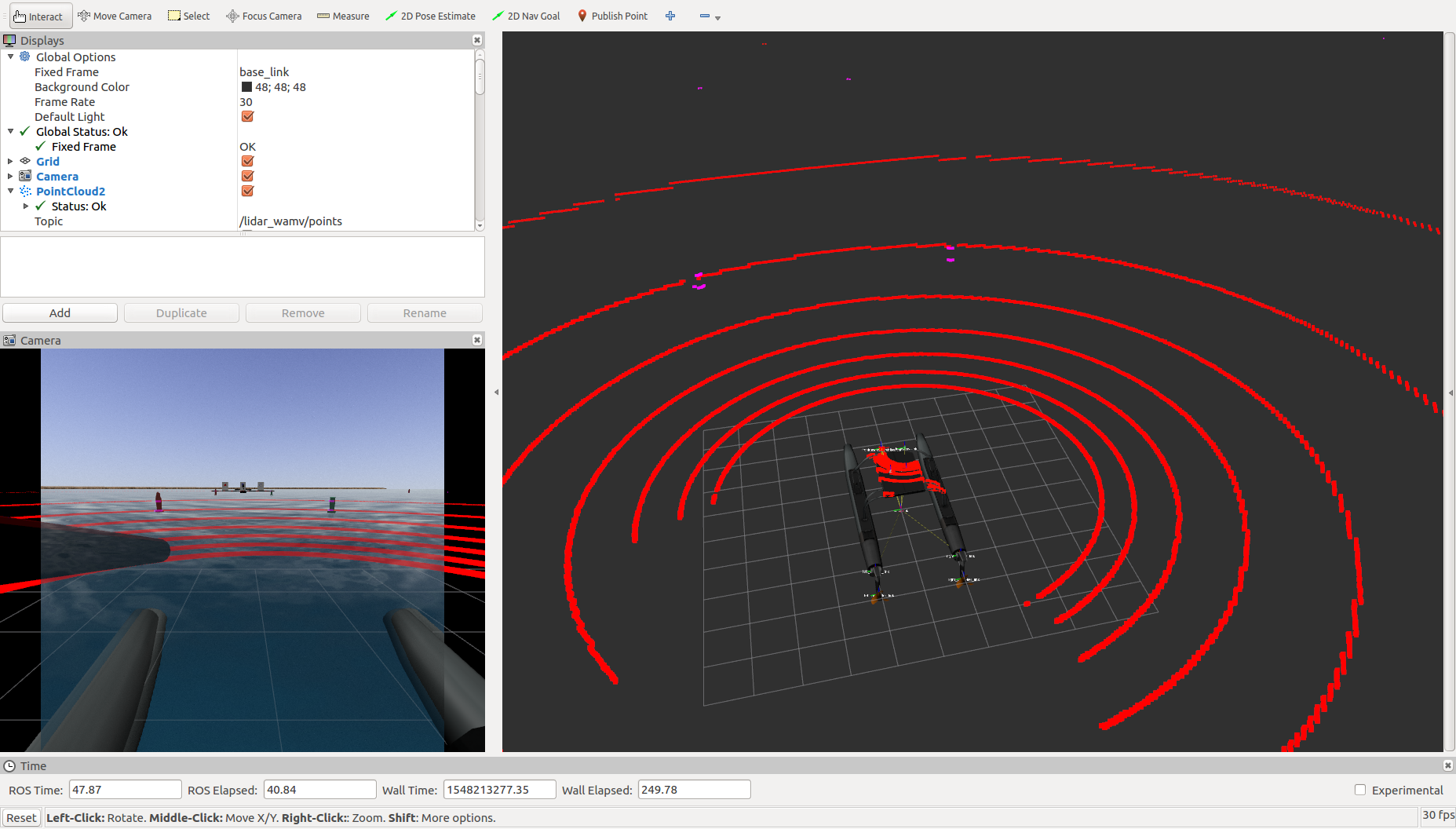
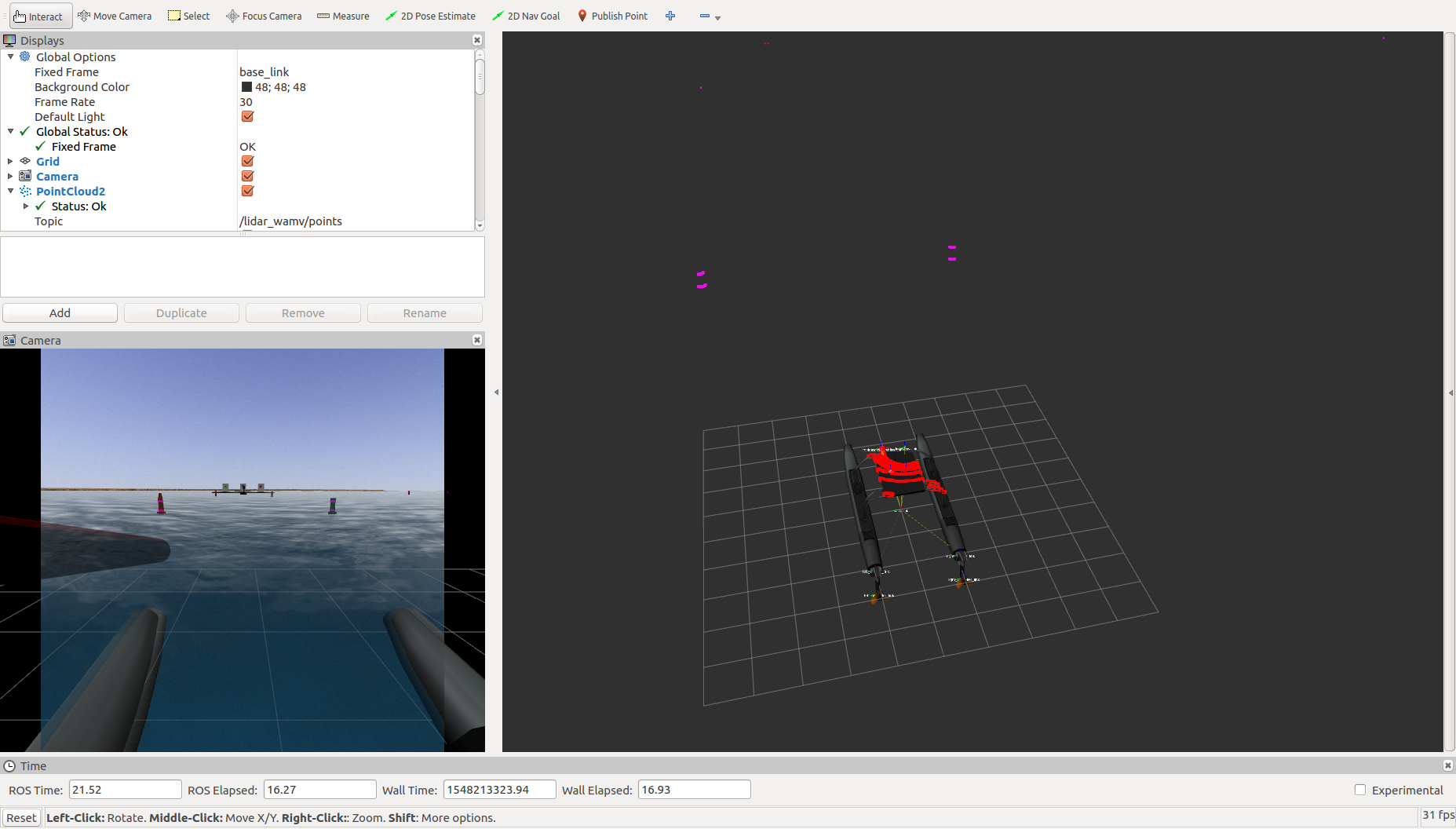
After some experimentation, the laser_retro tag is supported by the GPU velodyne_lidar plugin when applied to the visual element of the SDF description. However, all generated lidar returns within the maximum and minimum ranges will be returned even if they have a low intensity value. I have modified a version of the velodyne_simulator plugin that will optionally clip points that have an intensity that lies beneath a specified threshold. If the laser retro value of the ocean is set to a negative value, ocean points can then be removed from the lidar return while still detecting objects that have the default laser_retro value of zero. This version of the plugin can be found here: https://bitbucket.org/JonathanWheare/velodyne_simulator/src/master/
Without clipping. In this image the lidar has returned approximately 14,000 points.
with clipping. In this image only approximately 2500 points have been returned by the lidar.
(Note: buoy laser_retro values have been set to 100 to enable them to be clearly distinguished from the ocean return.)
{kind=link}
Regards,
Jonathan.
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Brian Bingham (Bitbucket: brian_bingham).
Thank you @JonathanWheare. This seems very promising. I'll let Carlos comment on the details. Do we think that the velodyne_simulator folks will entertain a PR to implement this feature? From your fork it seems like a low-impact addition.
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare).
Hi Brian,
I think it is a sensible enhancement to the simulator package.
Regards,
Jonathan.
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
Hi Jonathan, this solution looks very promising. One more question: Aren't the beams hitting the ocean floor? It's not clear from your picture but I'd expect to happen.
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
In any case, I suggest to go ahead and submit your pull request. Looks like a good contribution to velodyne_simulator. I'll share my comments in your pull request. Feel free to tag me.
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare).
Hi Carlos,
I cannot tell you exactly how far through the water surface that a lidar will give a return, but I can state that my experience has been that such returns have been very rare. The west lakes image I linked to was an accumulation of several passes of the lidar, and beyond the vehicle, shore and test docking area (shown here: https://csem.flinders.edu.au/competitions/maritime_robotx/images/gallery/west_lakes_docking.jpg) only a small scattering of returns can be seen. I interpret these returns as coming from the water surface. There may be places where the water is shallow enough for a return to come from the floor, but in the RobotX course area, I expect such returns would be minimal.
{kind=link}
Thanks for your support, I will put together a pull request for velodyne_simulator.
Regards,
Jonathan.
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
Thanks Jonathan, looking forward to see the pull request!
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
- changed milestone from "0.5" to "1.1"
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Jonathan Wheare (Bitbucket: Jonathan Wheare).
Hi Carlos,
I just sent in pull request that should enable filtering of the returns. Note that by default, other objects in the world will still give zero intensity returns.
Regards,
Jonathan Wheare.
from vrx.
osrf-migration
commented on August 20, 2024
Original comment by Carlos Agüero (Bitbucket: caguero, GitHub: caguero).
- changed state from "new" to "resolved"
Solved with https://bitbucket.org/DataspeedInc/velodyne_simulator/pull-requests/7/master/diff and pull request #79. Thanks @JonathanWheare !
from vrx.
Related Issues (20)
- Adjusting the wavefield HOT 1
- Lidar detects water in ROS humble HOT 3
- How to reset the simulation in my code? HOT 1
- Cannot launch gazebo natively after run ros2 launch vrx_gz competition.launch.py world:=sydney_regatta HOT 4
- Running ROS 2 Gazebo Garden on Windows 11 with Docker image HOT 1
- Camera Depth topics in VRX_2019 don't work HOT 1
- How to change buoyancy configuration to make my model float HOT 3
- [ERROR] [launch]: Caught exception in launch (see debug for traceback): Caught exception when trying to load file of format [py]: No module named 'sdformat13' HOT 1
- Linear velocity HOT 2
- the webpage https://github.com/osrf/vrx/wiki/propulsion_characteristics_tutorial is still empty HOT 2
- Fuel world download failed HOT 3
- can't run vrx HOT 2
- What kind of surface water features are available in this framework ? HOT 1
- Error while following tutorials thruster_component_config. HOT 1
- Question of teleop_twist_keyboard HOT 1
- How can I create more WAM-Vs HOT 3
- How to obtain the wamv's real-time position HOT 1
- joint unit HOT 1
- Increasing the Maximum Velocity of USV HOT 3
- Issue about stereo camera info
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from vrx.