Comments (5)
 osrf-migration
commented on July 20, 2024
osrf-migration
commented on July 20, 2024
Original comment by Brian Bingham (Bitbucket: brian_bingham).
Raymond,
Thank you for the note. Have you tried the tutorial - https://osrf-migration.github.io/vrx-gh-pages/#!/osrf/vmrc/wiki/tutorials/PropulsionConfiguration ?
If I run the two examples ...
roslaunch robotx_gazebo sandisland.launch thrust_config:=T
roslaunch robotx_gazebo sandisland.launch thrust_config:=X
I see the different thruster/propulsion configurations without making any changes to the xacro files.
If you are still experiencing the issue, can you make sure you have updated the local repository - and that you are working from the default branch?
Lastly, the xacro processing should be done for you with catkin_make
Let us know.
Brian
from vrx.
osrf-migration
commented on July 20, 2024
Original comment by Raymond Andrade (Bitbucket: 808brick).
Hey Brian,
Those scripts run fine. It is only when trying to run the simulation with the urdf file for the sensors that the thruster configuration changes to the default "H" configuration.
So this:
#!unix
roslaunch robotx_gazebo sandisland.launch thrust_config:=T
roslaunch robotx_gazebo sandisland.launch thrust_config:=X
runs correctly, but when I try to add the sensors urdf file to the thruster configuration:
#!unix
roslaunch robotx_gazebo sandisland.launch urdf:=`pwd`/my_wamv.urdf thrust_config:=T
roslaunch robotx_gazebo sandisland.launch urdf:=`pwd`/my_wamv.urdf thrust_config:=X
Then the simulation will revert back to default "H" thruster configuration regardless, unless you edit wamv_gazebo.urdf.xacro like I mentioned above. Next time I will see if I can just use catkin_make to avoid needing to run the rosrun xacro command.
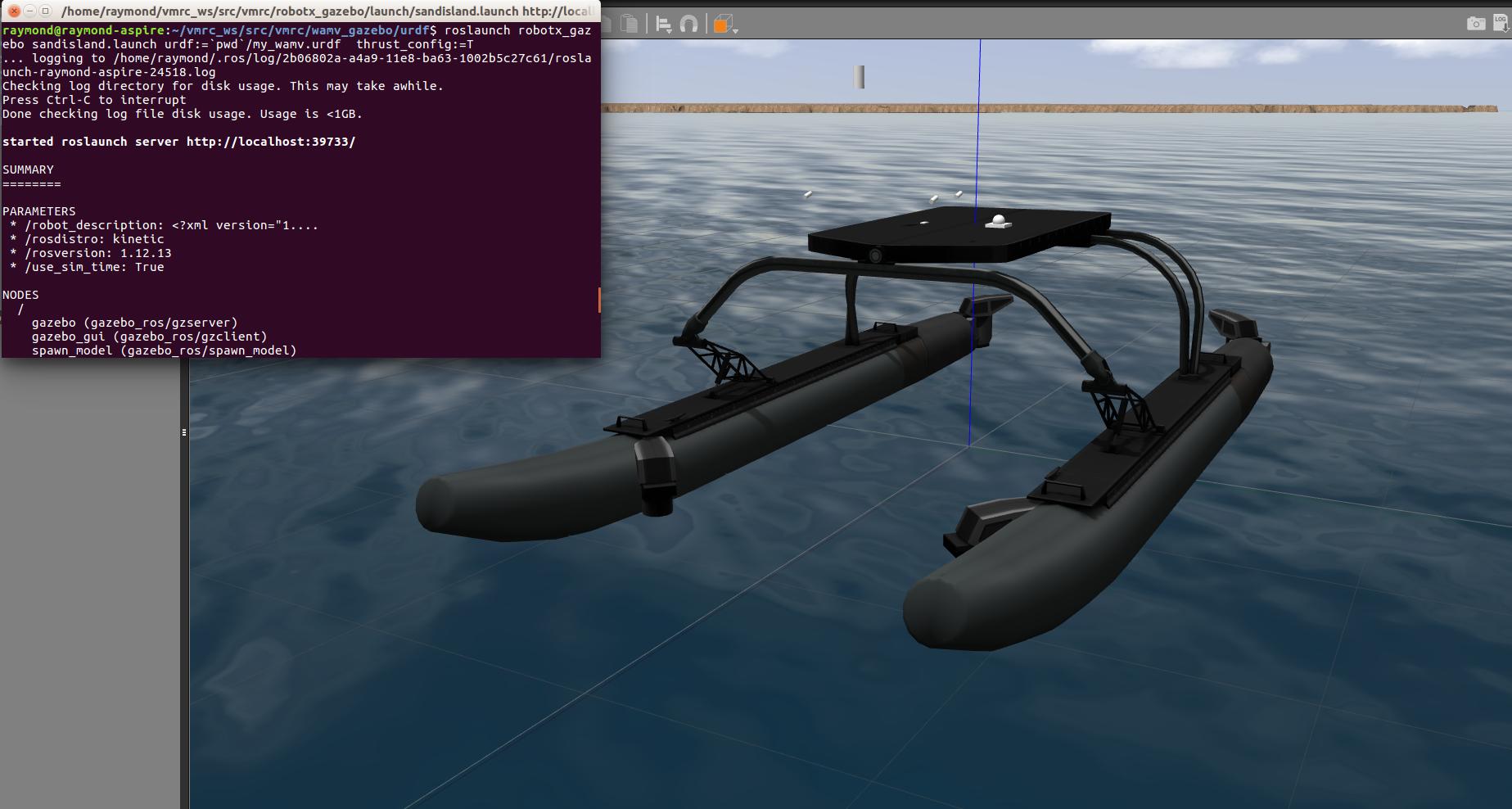
Here is a screenshot to illustrate. My wamv_gazebo.urdf.xacro is set with thruster_configuration "X", so even though I start the simulation as:
#!unix
roslaunch robotx_gazebo sandisland.launch urdf:=`pwd`/my_wamv.urdf thrust_config:=T
It will still load the "X" thruster configuration. Again this only happens when adding the sensor urdf.
from vrx.
osrf-migration
commented on July 20, 2024
Original comment by Brian Bingham (Bitbucket: brian_bingham).
Raymond,
Thanks for the thorough explanation - I'm tracking now.
I updated the tutorial instructions, adding a bit at the end on how to access the propulsion/thruster configurations.
https://osrf-migration.github.io/vrx-gh-pages/#!/osrf/vmrc/wiki/tutorials/AddingSensors
The more verbose wamv_gazebo_sensors.urdf.xacro is part of PR#45.
The thrust_config argument is used by the sandisland.launch file to specify a particular urdf file, so specifying the urdf explicitly conflicts. It is confusing.
Let us know if the updates work for you and we'll merge it into the default.
from vrx.
osrf-migration
commented on July 20, 2024
Original comment by Brian Bingham (Bitbucket: brian_bingham).
I'm assuming this worked, so resolving for now.
from vrx.
osrf-migration
commented on July 20, 2024
Original comment by Brian Bingham (Bitbucket: brian_bingham).
- changed state from "new" to "resolved"
from vrx.
Related Issues (20)
- Requesting Additional Information for Working With Simulator HOT 3
- Set Waves to a Non-zero steepness HOT 1
- Improve Wavefield parameter tutorial and message HOT 3
- Proofread VRX 2023 Documentation HOT 9
- Update Changelog for release 2.2
- New version of testing tutorial HOT 2
- New Example Team image for VRX 2.0 HOT 5
- RosBridge from Ros Noetic to Ros2 Humble HOT 3
- Upstream changes broke the `test-humble-garden` CI workflow HOT 2
- Update VRX-Docker HOT 1
- Change default Gazebo installation from source to binaries HOT 11
- Wave Surface stays flat HOT 8
- WorldControl service bridge error in 2.2 HOT 5
- Windows Docker Support HOT 7
- Clean Install produces "Source file extensions must be explicit" warning HOT 1
- imu orientation data in not w.r.t standard frames HOT 4
- Gazebo monocular camera + lidar projection misalignment HOT 1
- Inquiry on tutorials to Use plugins for ROS 2 Humble HOT 1
- Many topics don't publish if world is specified with an absolute path HOT 5
- TF frames are inconsistent HOT 3
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from vrx.