

Unofficial iRobot Roomba 980 node.js library (SDK).
With this library you can send commands to your Roomba 980 through the iRobot cloud API or directly from your LAN and integrate your roboot with your own Home Automation or IoT project.
See rest980 if you need a HTTP REST API interface.
All this document is only for firmware 2.x.x. Check your robot version!
If you have firmware version 1.6.x click here to see the old documentation.
There are some breaking changes between 1.6.x and 2.x.x in this API (dorita980 v2 and v3).
- Get your username/password easily
- Auto discovery robot IP (optional)
- Local API control (from your LAN)
- Simplified Cleaning Preferences settings.
- Firmware 2.0.0 compatible.
- See rest980 if you need a HTTP REST API interface to use dorita980 throw.
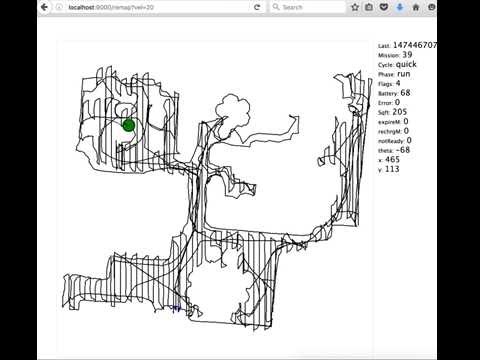
Video: Realtime cleaning map using dorita980 lib in rest980.
First you need node.js installed and then:
$ npm install dorita980 --saveYou can control the robot from your local network.
Create myapp.js file with this content:
var dorita980 = require('dorita980');
var myRobotViaLocal = new dorita980.Local('MyUsernameBlid', 'MyPassword', '192.168.1.104'); // robot IP address
myRobotViaLocal.on('connect', function () {
myRobotViaLocal.start().then(() => {
myRobotViaLocal.end(); // disconnect to leave free the channel for the mobile app.
}).catch((err) => {
console.log(err);
});
});Then install dorita980 using npm and run your program:
$ npm install dorita980 --save
$ node myapp.jsPause the robot via Local request:
var dorita980 = require('dorita980');
var myRobotViaLocal = new dorita980.Local('MyUsernameBlid', 'MyPassword', '192.168.1.104'); // robot IP address
myRobotViaLocal.on('connect', function () {
// Pause!
myRobotViaLocal.pause().then(() => {
myRobotViaLocal.end(); // disconnect to leave free the channel for the mobile app.
}).catch((err) => {
console.log(err);
});
});Get robot week schedule
var dorita980 = require('dorita980');
var myRobotViaLocal = new dorita980.Local('MyUsernameBlid', 'MyPassword', '192.168.1.104'); // robot IP address
myRobotViaLocal.on('connect', function () {
myRobotViaLocal.getWeek().then((weekConfig) => {
console.log(weekConfig)
myRobotViaLocal.end(); // disconnect to leave free the channel for the mobile app.
}).catch((err) => {
console.log(err);
});
});(Needed for Cloud and Local requests)
Download or clone this repo then install, then run npm run getpassword. You need to know your robot IP address (look in your router or scan your LAN network with nmap to find it). Or use dorita980.getRobotIP() method.
$ git clone https://github.com/koalazak/dorita980.git
$ cd dorita980
$ npm install
$ npm run getpassword <robotIP>Example Output:
$ cd dorita980
$ npm install
$ npm run getpassword 192.168.1.103
> node ./bin/getpassword.js "192.168.1.103"
Make sure your robot is on the Home Base and powered on. Then press and hold the HOME button on your robot until it plays a series of tones (about 2 seconds). Release the button and your robot will flash WIFI light.
Then press any key...
Looking for robots...
Robot found! with blid/username: xxxxxxxxxxxxx
{ ver: '2',
hostname: 'Roomba-xxxxxxxxxxxxx',
robotname: 'Dorita',
ip: '192.168.1.103',
mac: '12:12:12:12:12:12',
sw: 'v2.0.0-34',
sku: 'R98----',
nc: 0,
proto: 'mqtt' }
Password=> :1:1486937829:gktkDoYpWaDxCfGh <= Yes, all this string.
Use this credentials in dorita980 lib :)
If you dont known the robot IP address to use in dorita980.Local() you can use dorita980.getRobotIP() to find it.
This process takes 1 or 2 seconds, so if you know the IP just use it explicity.
You need UDP brodcast enable in your network!
var dorita980 = require('dorita980');
dorita980.getRobotIP(function (ierr, ip) {
if (!ierr) {
var myRobotViaLocal = new dorita980.Local('MyUsernameBlid', 'MyPassword', ip);
myRobotViaLocal.getMission().then((response) => {
console.log(response);
}).catch((err) => {
console.log(err);
});
} else {
console.log('error looking for robot IP');
}
});You can also use .discovery method to get all the robots discovery data:
You need UDP brodcast enable in your network!
var dorita980 = require('dorita980');
dorita980.discovery(function (ierr, data) {
console.log(data);
});Will print:
{ ver: '2',
hostname: 'Roomba-xxxxxxxxxxxxx',
robotname: 'Dorita',
ip: '192.168.1.103',
mac: '12:12:12:12:12:12',
sw: 'v2.0.0-34',
sku: 'R98----',
nc: 0,
proto: 'mqtt' }
The library send commands direclty over wifi to your robot. You dont need internet connection.
Close the connection to the robot. Its important if you want to send commands via the official mobile app via Local network. There's maximum 1 connection at any time in local ntwork, so if your app is connected, the official mobile app only works via cloud access.
Meanwhile dorita980 is connect you can call other methods to send commands and listen for the events to get data. Just not call .end() method if you want. Meanwhile dorita980 is connected the official mobile app will then just go via the cloud to send commands to your robot.
Get robot state but wait for waitForFields fields before return.
The robot push data to this state all the time. The state object start empty and the robot will increasing the data here over the time.
myRobotViaLocal.getRobotState(['batPct', 'bbchg3']).then((actualState) => {
console.log(actualState);
});Full state should contains:
{ netinfo:
{ dhcp: true,
addr: 4294967040,
mask: 4294967040,
gw: 4294967040,
dns1: 4294967040,
dns2: 0,
bssid: '12:12:12:12:12:12',
sec: 4 },
wifistat: { wifi: 1, uap: false, cloud: 4 },
wlcfg: { sec: 7, ssid: '123123123123123123123123' },
mac: '34:34:34:34:34:34',
country: 'US',
cloudEnv: 'prod',
svcEndpoints: { svcDeplId: 'v005' },
localtimeoffset: -180,
utctime: 1487103319,
pose: { theta: 61, point: { x: 171, y: -113 } },
batPct: 100,
dock: { known: true },
bin: { present: true, full: false },
audio: { active: false },
cleanMissionStatus:
{ cycle: 'none',
phase: 'charge',
expireM: 0,
rechrgM: 0,
error: 0,
notReady: 0,
mssnM: 2,
sqft: 29,
initiator: 'manual',
nMssn: 324 },
language: 2,
noAutoPasses: false,
noPP: false,
ecoCharge: false,
vacHigh: false,
binPause: false,
carpetBoost: true,
openOnly: false,
twoPass: false,
schedHold: false,
lastCommand: { command: 'dock', time: 1487103424, initiator: 'manual' },
langs:
[ { 'en-US': 0 },
{ 'fr-FR': 1 },
{ 'es-ES': 2 },
{ 'de-DE': 3 },
{ 'it-IT': 4 } ],
bbnav: { aMtrack: 45, nGoodLmrks: 15, aGain: 12, aExpo: 9 },
bbpanic: { panics: [ 8, 8, 8, 14, 8 ] },
bbpause: { pauses: [ 15, 0, 0, 0, 0, 0, 0, 0, 0, 17 ] },
bbmssn:
{ nMssn: 323,
nMssnOk: 218,
nMssnC: 99,
nMssnF: 1,
aMssnM: 35,
aCycleM: 31 },
bbrstinfo: { nNavRst: 41, nMobRst: 0, causes: '0000' },
cap: { pose: 1, ota: 2, multiPass: 2, carpetBoost: 1 },
sku: 'R98----',
batteryType: 'lith',
soundVer: '31',
uiSwVer: '4582',
navSwVer: '01.09.09',
wifiSwVer: '20902',
mobilityVer: '5309',
bootloaderVer: '3580',
umiVer: '5',
softwareVer: 'v2.0.0-34',
tz:
{ events: [ { dt: 0, off: -180 }, { dt: 0, off: -180 }, { dt: 0, off: 0 } ],
ver: 2 },
timezone: 'America/Buenos_Aires',
name: 'robotNAme',
cleanSchedule:
{ cycle: [ 'none', 'none', 'none', 'none', 'none', 'none', 'none' ],
h: [ 17, 10, 10, 12, 10, 13, 17 ],
m: [ 0, 30, 30, 0, 30, 30, 0 ] },
bbchg3:
{ avgMin: 158,
hOnDock: 6110,
nAvail: 1280,
estCap: 12311,
nLithChrg: 233,
nNimhChrg: 0,
nDocks: 98 },
bbchg: { nChgOk: 226, nLithF: 0, aborts: [ 4, 4, 4 ] },
bbswitch: { nBumper: 55889, nClean: 300, nSpot: 47, nDock: 98, nDrops: 300 },
bbrun:
{ hr: 211,
min: 48,
sqft: 566,
nStuck: 17,
nScrubs: 85,
nPicks: 592,
nPanics: 178,
nCliffsF: 1532,
nCliffsR: 2224,
nMBStll: 0,
nWStll: 1,
nCBump: 0 },
bbsys: { hr: 6522, min: 54 },
signal: { rssi: -43, snr: 40 } }Get full robot state but wait for ['cleanMissionStatus', 'cleanSchedule', 'name', 'vacHigh', 'pose'] fields before return.
Alias for getRobotState(['cleanMissionStatus', 'cleanSchedule', 'name', 'vacHigh', 'pose', 'signal'])
Waiting for 'signal' we are sure we have the full state object.
Partial overwrite the robot state to configure it.
var newPreferences = {
binPause: false
};
myRobotViaLocal.setPreferences(newPreferences)Response:
{"ok":null}With this you can draw a map :)
{ cleanMissionStatus:
{ cycle: 'none',
phase: 'charge',
expireM: 0,
rechrgM: 0,
error: 0,
notReady: 0,
mssnM: 15,
sqft: 0,
initiator: 'localApp',
nMssn: 323 },
pose: { theta: -160, point: { x: 166, y: -11 } } }{ wifistat: { wifi: 1, uap: false, cloud: 4 },
netinfo:
{ dhcp: true,
addr: 3232235880,
mask: 4294967040,
gw: 3232235777,
dns1: 3232235777,
dns2: 0,
bssid: 'c0:56:27:70:3b:fe',
sec: 4 } }1487100141 { hr: 211,
min: 48,
sqft: 566,
nStuck: 17,
nScrubs: 85,
nPicks: 592,
nPanics: 178,
nCliffsF: 1532,
nCliffsR: 2224,
nMBStll: 0,
nWStll: 1,
nCBump: 0 } [ { 'en-US': 0 },
{ 'fr-FR': 1 },
{ 'es-ES': 2 },
{ 'de-DE': 3 },
{ 'it-IT': 4 } ]{ bbrstinfo: { nNavRst: 41, nMobRst: 0, causes: '0000' },
cap: { pose: 1, ota: 2, multiPass: 2, carpetBoost: 1 },
sku: 'R98----',
batteryType: 'lith',
soundVer: '31',
uiSwVer: '4582',
navSwVer: '01.09.09',
wifiSwVer: '20902',
mobilityVer: '5309',
bootloaderVer: '3580',
umiVer: '5',
softwareVer: 'v2.0.0-34',
audio: { active: false },
bin: { present: true, full: false } }{ wifi: 1, uap: false, cloud: 4 },
wlcfg: { sec: 7, ssid: '1234567890796857336364' }Monday disable and every day start at 10:30am
{ cycle: [ 'none', 'none', 'none', 'none', 'none', 'none', 'none' ],
h: [ 17, 10, 10, 12, 10, 13, 17 ],
m: [ 0, 30, 30, 0, 30, 30, 0 ] }Disable Sunday and set every day at 10:30am
var newWeek = {"cycle":["none","start","start","start","start","start","start"],"h":[10,10,10,10,10,10,10],"m":[30,30,30,30,30,30,30]}
myRobotViaLocal.setWeek(newWeek)Response:
{"ok":null}prod{"ok":null}{"ok":null}{"ok":null}{"ok":null}Note: before dock you need to pause() or stop() your robot.
{"ok":null}This methods use setPreferences() with the correct flags for each setting.
{"ok":null}Emitted on successful Connection.
function () {}
Put your code inside this callback.
Emitted after a disconnection.
Emitted when the client goes offline.
Emitted every time the Robot publish a new message to the mqtt bus.
function (data) {}
dataData published by the Robot
myRobotViaLocal.on('update', function (data) {
console.log(data);
});Will print:
{ state:
{ reported:
{ soundVer: '31',
uiSwVer: '4582',
navSwVer: '01.09.09',
wifiSwVer: '20902',
mobilityVer: '5309',
bootloaderVer: '3580',
umiVer: '5',
softwareVer: 'v2.0.0-34' } } }Emitted every emitIntervalTime milliseconds with the mission data. (util for mapping)
function (data) {}
dataMission data withcleanMissionStatusandposestate properties.
var cleanMissionStatus = 300; // default is 800ms
var myRobotViaLocal = new dorita980.Local('MyUsernameBlid', 'MyPassword', '192.168.1.104', 2, cleanMissionStatus); // Note Firmware version.
myRobotViaLocal.on('mission', function (data) {
console.log(data);
});Will print each 300ms:
{ cleanMissionStatus:
{ cycle: 'none',
phase: 'charge',
expireM: 0,
rechrgM: 0,
error: 0,
notReady: 0,
mssnM: 15,
sqft: 0,
initiator: 'localApp',
nMssn: 323 },
pose: { theta: -160, point: { x: 166, y: -11 } } }Emitted every time the Robot publish a new message to the mqtt bus.
function (data) {}
dataFull robot state object
myRobotViaLocal.on('state', function (data) {
console.log(data);
});Will print the Full robot state!
Not implemented yet in Firmware 2.0.0. Help wanted!
dorita980 is compatible with node.js > 4.0 But you can use the getpassword feature in node.js < 4.0 using --harmony flag like that:
$ node --harmony ./bin/getpassword.js "192.168.1.104"


