SE-Sync, proposed by D. Rosen et al.[1], is claimed to be a certifiably correct algorithm for synchronization over Special Eucliden Group and provide globally optimal solution if exists, which can be used in the pose-graph optimization of SLAM systems. We want to investigate its performance over g2o[2], a widely used library for graph optimization, on SLAM tasks.
Our work is based on DVO SLAM[3], a SLAM system that originally utilizes g2o library in its back-end pose-graph optimization. We replace g2o codes with SE-Sync, evaluate the performance of modified DVO SLAM on some sequences in TUM dataset[4], and do a comparison with the results of original DVO SLAM. Our work is summarized in the following section.
In DVO SLAM, g2o works in three places: 1) The first one is the optimization of a newly got local graph before it's inserted into the global graph. 2) After that, DVO SLAM try establishing loop closure constraints between keyframes, and perform g2o optimization on the global graph if new constraints are set up. If any outlier constraint is detected, it would be removed and the global graph would be optimized again by g2o. 3) When SLAM process ends, global graph optimization by g2o and outlier constraints detection like what is done in step 2) are performed iteratively and end when either no outlier constraint is detected or 10 iterations are performed.
Thus in our experiment, we try several ways to incorperate SE-Sync into DVO SLAM, the optimization performances of which are shown in the table below. Besides, we also evaluate the how runtime of SE-Sync varies as the size of graph grows. The performance of original g2o optimization is also included for comparison.
RMSE of absolute trajectory error on some TUM sequences are shown here for evaluation. Generally speaking, in terms of mean RMSE value, only implementation (4) has about 7% overall improvement compared to original g2o optimization, implementation (2) is even quite worse, and others are about the same. It can be noticed that among the results of implementation (2), RMSE of sequences fr1_360 and fr2_dishes are much higher than other implementations, while other sequences have similar results. Furthermore, implementation (2) is the only one that replaces g2o in step 3) with SE-Sync, which removes outliers iteratively. Since SE-Sync aims at producing globally optimum results, if some extreme outliers exist, the optimization results may have large deviations, then some constraints might be errorly removed in the next iteration, leading to worse deviation. Thus, a possible problem SE-Sync may have is that it's vulnerable to outliers, consequently its performances could not be guaranteed and currently it could not completely replace g2o in this aspect.
implementation (1) (2) (3) (4) (5) (6) (7) (8)
fr1_360 0.091643 0.231445 0.094439 0.071950 0.095184 0.095479 0.110079 0.104853
fr1_desk 0.022747 0.021713 0.022802 0.022565 0.021726 0.021726 0.021765 0.021972
fr1_desk2 0.027864 0.028452 0.028676 0.026995 0.029616 0.030655 0.029381 0.028833
fr1_plant 0.030187 0.029949 0.030117 0.031065 0.029377 0.028414 0.028350 0.030798
fr1_room 0.081622 0.071230 0.080350 0.071358 0.074496 0.073656 0.074333 0.071186
fr1_rpy 0.023377 0.021999 0.023494 0.021920 0.022046 0.021947 0.024542 0.022506
fr1_teddy 0.039596 0.048779 0.038841 0.048249 0.047388 0.047900 0.052620 0.050110
fr1_xyz 0.012997 0.012631 0.012984 0.012605 0.012997 0.012527 0.013254 0.012548
fr2_desk 0.078666 0.067789 0.078979 0.065512 0.067410 0.065490 0.070938 0.067138
fr2_dishes 0.052436 0.623265 0.051506 0.052474 0.051997 0.052141 0.054243 0.053548
fr3_long_o 0.022960 0.025396 0.025765 0.026022 0.026432 0.024961 0.025914 0.026080
mean 0.044009 0.107513 0.044359 0.040974 0.043515 0.043172 0.045947 0.044506
(1):Original g2o optimization
(2):Replace all g2o with SE-Sync, add SE-Sync after step 3)
(3):Replace g2o with SE-Sync in step 1)
(4):Replace g2o with SE-Sync in step 1) and 2), add SE-Sync after step 3)
(5):Only add SE-Sync after step 3)
(6):Replace g2o with SE-Sync in step 1), add SE-Sync after step 3)
(7):Replace all global SE-Sync in (4) with global SE-Sync on keyframes
(8):Replace all global SE-Sync but that after step 3) in (4) with global SE-Sync on keyframes
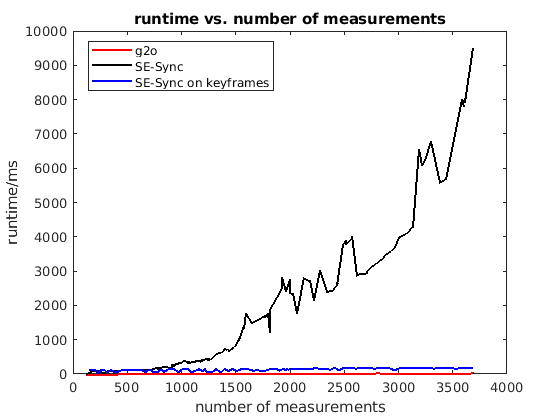
Implementation (4) is the only one that clearly excels original g2o optimization in overall RMSE value, but actually it's impractical to run because of runtime. In the figure shown below, it can be seen that the runtime of SE-Sync grows apparantly as number of measurements increases, while g2o runtime remains almost no change. To solve this problem, we try to perform SE-Sync only on keyframes each time, and use optimized keyframes to approximately optimize frames, which is what implementation (7) and (8) do. Since numbers of keyframes and measurements between them are much fewer and grow much slower, the runtime is comparable to g2o and could be improved further. However, the optimization results show no overall improvement over g2o in these cases.
Our project discover two problems of SE-Sync when trying to use it to perform pose-graph optimization in DVO SLAM. Firstly, it's vulnerable to outliers. Thus, it needs to be robustified before it could be used practically. Secondly, its runtime grows apparently as the graph size increases. By performing it only on keyframes, the graph size remains small and the runtime is acceptable, but the optimization results are also compromised and not better original one in general. In conclusion, we think that currently SE-Sync is not a better choice than g2o in pose-graph optimization.
Because this project is only done experimentally, we didn't combine DVO SLAM and SE-Sync into one project, and they need to be compiled seperately. For more instructions, please read the readme documents in directory DVO_SLAM and SE-Sync.
[1] Rosen, David M, Luca Carlone, Afonso S Bandeira, and John J Leonard. “SE-Sync: A Certifiably Correct Algorithm for Synchronization over the Special Euclidean Group.” The International Journal of Robotics Research 38, no. 2–3 (March 2019): 95–125. doi:10.1177/0278364918784361.
[2] R. Kümmerle, G. Grisetti, H. Strasdat, K. Konolige and W. Burgard, "G2o: A general framework for graph optimization," 2011 IEEE International Conference on Robotics and Automation, Shanghai, 2011, pp. 3607-3613. doi: 10.1109/ICRA.2011.5979949
[3] C. Kerl, J. Sturm and D. Cremers, "Dense visual SLAM for RGB-D cameras," 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, 2013, pp. 2100-2106. doi: 10.1109/IROS.2013.6696650
[4] J. Sturm, N. Engelhard, F. Endres, W. Burgard and D. Cremers, "A benchmark for the evaluation of RGB-D SLAM systems," 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, 2012, pp. 573-580. doi: 10.1109/IROS.2012.6385773


