Non-Intrusive Load Monitoring Device
This is a simplified version of the NILM devices where it implement Raspberry PI 4B and PZEM-004t which is current and voltage sensor. where it works as electical monitor that have a website deployed from the Raspberry Pi, it use machine learning to understand the behaviour of the appliance and give predictions based on it.
Firstly, you have to setup the raspberry pi
Update and upgrade to the latest version of Raspbian using the following commands
sudo apt-get update
sudo apt-get upgradeif you dont have the GPIO package installed, you simply install it by running the following command.
sudo apt-get install rpi.gpioSetting up the I2C pins on the raspberry Pi is super easy and will only take a couple of minutes to do. Secondly, go to the Raspi-config tool by entering the following command.
sudo raspi-configin here go to Interface Options and then to I2c, enable I2c by selecting Yes
The Pi should now alert you that I2c will be enabled after reboot. It will then ask if you want it to be loaded by default. Select Yes if you plan on using I2c everytime the raspberry pi boots up.
now we want to make sure it has successfully enabled the necessary modules. To this, enter the following command.
lsmod | grep i2c_To connect the Raspberry Pi to the PZEM-004t correctly to collect the measurements of the appliances such as voltage, current, power, e4nergy, frequency, power factor.
| Raspberry PI GPIO | PZEM-004t |
|---|---|
| 5V ( GPIO 2) | 5v |
| GND ( GPIO 6) | GND |
| TX (GPIO 14) | RX |
| RX (GPIO 15) | TX |

In order to have a functioning code, you will need to download Modbus-tk which is the serial communication encoding that is used between the PZEM-004t and Raspberry Pi. to download it, just type the following code in the terminal in your Raspberry Pi:
sudo pip3 install modbus-tkthen run the python code under the name: PZEM-004t Raspberry Pi.py which must run effortlessly.
you can download the files using the simple command:
git clone https://github.com/Osama29/NILMIncase you were using a TTL to UART Module which use the USB port of the Raspberry Pi, then all you have to do is connect the USB Module and then change the following code in the PZEM-004t Raspberry Pi.py:
if __name__ == '__main__':
try:
serial_port = serial.Serial(
port '/dev/ttyS0',
baudrate = 9600,
bytesize= 8,
parity='N',
stopbits=1,
xonxoff=0
)Change the code to the following code:
if __name__ == '__main__':
try:
serial_port = serial.Serial(
port '/dev/ttyUSB0',
baudrate = 9600,
bytesize= 8,
parity='N',
stopbits=1,
xonxoff=0
)by that you will gain the ability to use the USB module to connect to the PZEM-004t by connecting the TTL to UART Module., you hbave to make sure that the wiring and the hardware are connected correctly.
if you were trying to run PZEM-004t Raspberry Pi.py and it showed the following error:
Traceback (most recent call last):
File "/home/raspberrypi/PZEM-004t Raspberry Pi.py", line 4, in <module>
import modbus_tk.defines as cst
ModuleNotFouundError: No module named 'modbus_tk'
------------------
(program exited with code: 1)
Press return to continueThen all you have to do is to run this comand in the terminal:
sudo pip3 install modbus-tkif you were trying to run PZEM-004t Raspberry Pi.py and it showed the following error:
Traceback (most recent call last):
File "PZEM-004t Raspberry Pi.py", line 3, in <module>
import serial
ImportError: No module named serial
------------------
(program exited with code: 1)
Press return to continueyou can solve this issue by applying these steps:
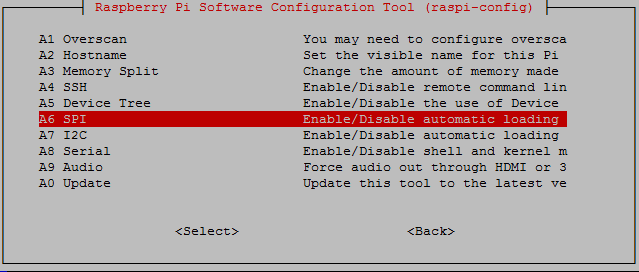
- Open your terminal on Raspberry Pi and type:
sudo raspi-config- after access the menu which will look like this
head to 3 Interface Options
-
Press on
I6 Serial Portand clickNofor the first option. -
Click
Yesfor the second option. -
Click
Finish -
Type
rebootto reboot the system after saving the changes -
Done

