Frame v2.1 upper leg's servo horn, linked leg bridge, and bridge bearing press fit together.
Video: frame v2.1 first tests
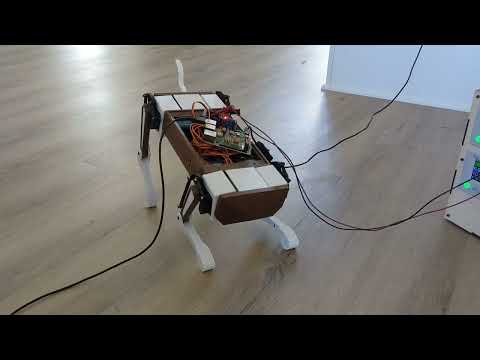
Video: Sydney meets Zuko
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
Complete ROS2 tasks - in progress
Fab/test expansion-board PCB
Update BOM
Create PCB BOM
Upload STL's
Create print time/weight sheet
Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
Parameterized duplicated hard-coded values.
Created servo calibration script for quicker calibration and servo support.-
A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
8x 18650 user accessable battery holder with onboard BMS (battery management system).
The servo spline gear (25T internal, 12T external) used in this design is patented as seen in
servocity.com/2305-series-brass-mod-0-8-servo-gear-25-tooth-spline-12-tooth. This significantly impacts its availability compared to the other parts of Zuko, that can mostly be sourced from a multitude of manufacturers or substituted with similar parts, despite being a relatively simple hardware component. For example, the more commonly used 20mm metal disc servo horn is available from many sites internationally for just a few dollars (or just a couple in some areas) for all 12. On the other hand, the servo spline gear appears to be almost non-existent outside of specialty stores, and even the relatively cheap Aliexpress link provided in the BOM puts them at about the cost the cost of about 2 high torque servos for the 12 pieces required. As such, it would be great if Zuko could officially be compatible with metal disc servo horns, or if the use of the spline gears were reduced. At least for the hip servos, it should be possible to use metal discs by lengthening the chassis slightly and widening a few holes.
P.S. Thanks for the great contributions in porting OpenQuad code to ROS 2 and a Kangal-style chassis.