ROS(1-1)搭建ROS环境
本章主要讲解的是ROS Kinect 版本在Ubuntu __16.04__系统上的安装,后面的内容会在此环境下进行。
#1. 添加ROS的镜像源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
添加的镜像源为**科技大学的镜像源。由于ROS的主服务器在国外,国内访问时速度比较慢,因此我们添加国内镜像源。
#2. 配置密钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
如果以上服务器在连接过程中存在问题,可以用以下两个备选地址: hkp://pgp.mit.edu:80 hkp://keyserver.ubuntu.com:80
#3. 更新Ubuntu的源
sudo apt-get update
这个步骤如果更新速度比较慢,请回到ubuntu系统配置中,配置ubuntu的源为阿里的源

#4. 安装ROS kinetic
sudo apt-get install ros-kinetic-desktop-full
ros-kinetic-desktop-full内置了很多ROS的开发工具,作为开发阶段而言,我们选择此版本进行安装。
注意细节:在Ubuntu18.04.1系统中配置ROS的时候一直提示E:无法定位软件包,后来发现是ROS的版本不对应导致的,每个不同的ubuntu系统对应着不同的ROS版本,如果装错了就会出现上述问题,在Ubuntu18.04.1环境下可以安装的是melodic版本的,安装教程可以参考官网安装教程,ROS有Melodic、Lunar、Kinetic不同的种类对应着不同的ubuntu版本,
Melodic 主要对应:Ubuntu Artful (17.10), Bionic (18.04 LTS) 以及Debian Stretch
Kinetic 主要对应:Ubuntu Wily (15.10) and Ubuntu Xenial (16.04 LTS),
在安装的过程中要根据自己的ubuntu系统版本选择对应的ROS类型进行安装,具体的ROS类型可以在官网分支类型介绍上查看。
#1. 初始化rosdep
sudo rosdep init
rosdep update
在使用ROS之前,需要初始化rosdep。 rosdep可以轻松地为要编译的代码添加系统依赖项,并且帮助我们运行ROS中核心组件。
#2. 配置全局环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
kinetic安装在/opt/ros/kinetic目录下,我们需要将安装目录下的功能包配置到系统的环境变量中去。这样我们才能使用ROS提供给我们的一些命令工具。
报错解决:

#3. 安装打包工具依赖
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
E: Failed to fetch http://45.252.224.77/files/2116000007703A52/packages.ros.org/ros/ubuntu/dists/xenial/main/binary-amd64/Packages.gz
E: Failed to fetch http://45.252.224.79/files/111600000609586B/mirrors.ustc.edu.cn/ros/ubuntu/dists/xenial/main/binary-i386/Packages.gz Hash Sum mismatch
E: Some index files failed to download. They have been ignored, or old ones used instead.
通常在安装过程中会出现 Hash Sum mismatch,这个时候,建议修改Ubuntu操作系统的软件源为http://mirrors.ustc.edu.cn。保证ros的源和ubuntu的源一致,规避掉hash校验的错误。
##测试安装 通过命令启动Ros Master
roscore

注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):

- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
-
- mkdir devtool
-
- cd devtool wget https://download.jetbrains.8686c.com/cpp/CLion-2019.1.4.tar.gz tar -zxvf CLion-2019.1.4.tar.gz
- 3.创建目录 mkdir -p $HOME/ws/ros_ws
- 4.创建src mkdir src
-
- cd ws/ros_ws catkin_make // 编译
-
- cd ws/ros_ws/src catkin_create_pkg sample_hello roscpp rospy rosmsg
-
- cd ws/ros_ws source devel/setup.bash // 配置环境变量
-
- cd wx/ros_ws roscore
-
- 打开另一个终端
cd ~/devtool/clion-2019.1.4/bin
./clion.sh
报错:Gtk-Message: Failed to load module "canberra-gtk-module"解决:apt-get install libcanberra-gtk-module
- 打开另一个终端
cd ~/devtool/clion-2019.1.4/bin
./clion.sh
-
- 打开工程
- 打开工程







- 另外打开一个新终端
如果tab不出来,cd ws/ros_ws目录下,source devel/setup.bash









- 另外打开一个新终端



注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic
注意点:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
需要先进行编译,如下图步骤2
编译的方式也可以采用这个:cd ws/ros_ws catkin_make

无需提前进行编译



ctrl+c停止不了循环,我们把while循环更改为如下图即可






注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic







注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic
这里省略创建工程的具体步骤,具体可参考ROS(2-1)
CMakeLists.txt文件修改




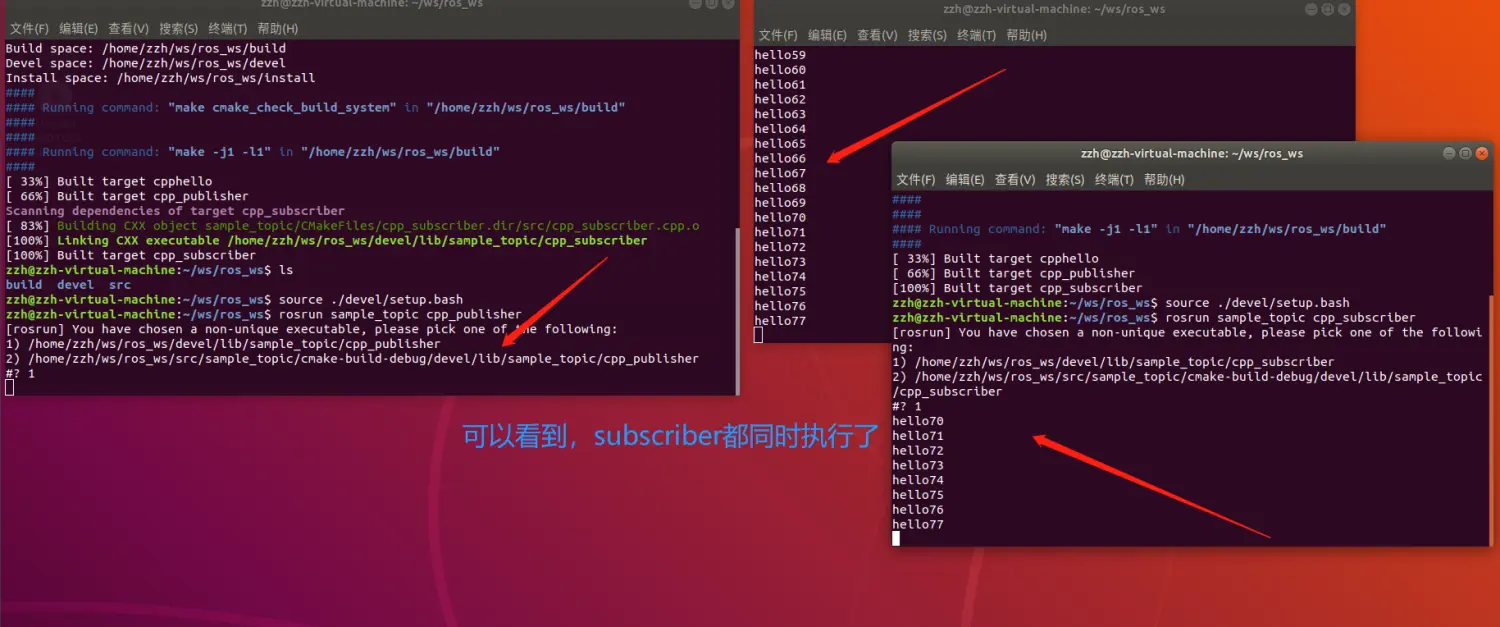
调试方式一:通过subscriber可以实现一个发布,一个接收,步骤3和步骤4


调试方式二:通过rostopic工具进行调试,模拟发布数据,没有publisher,在终端将subscriber一直打开
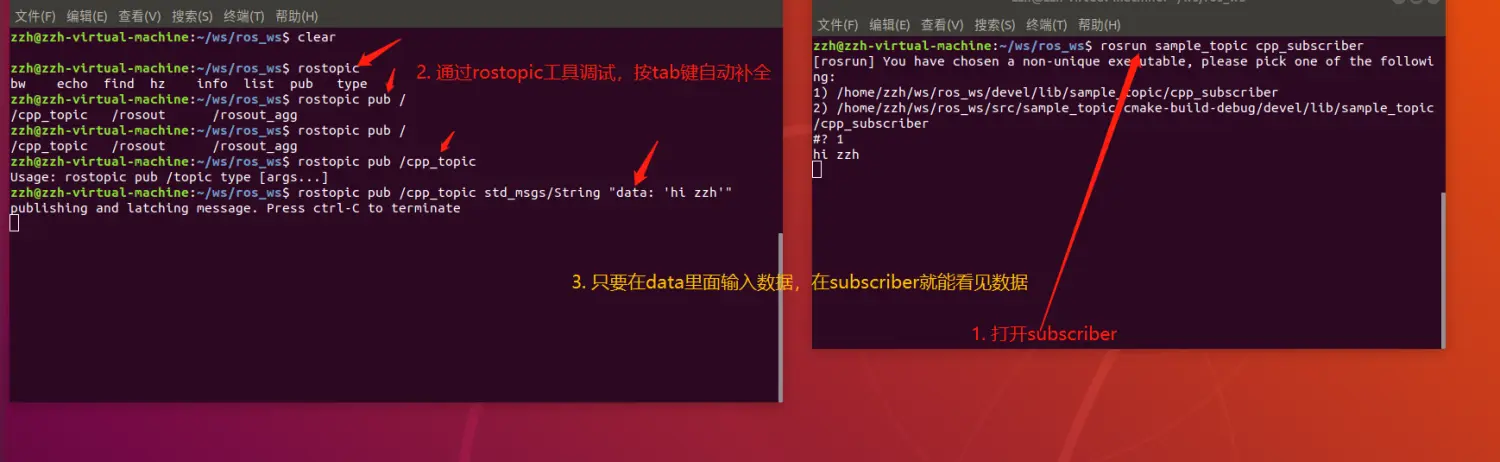
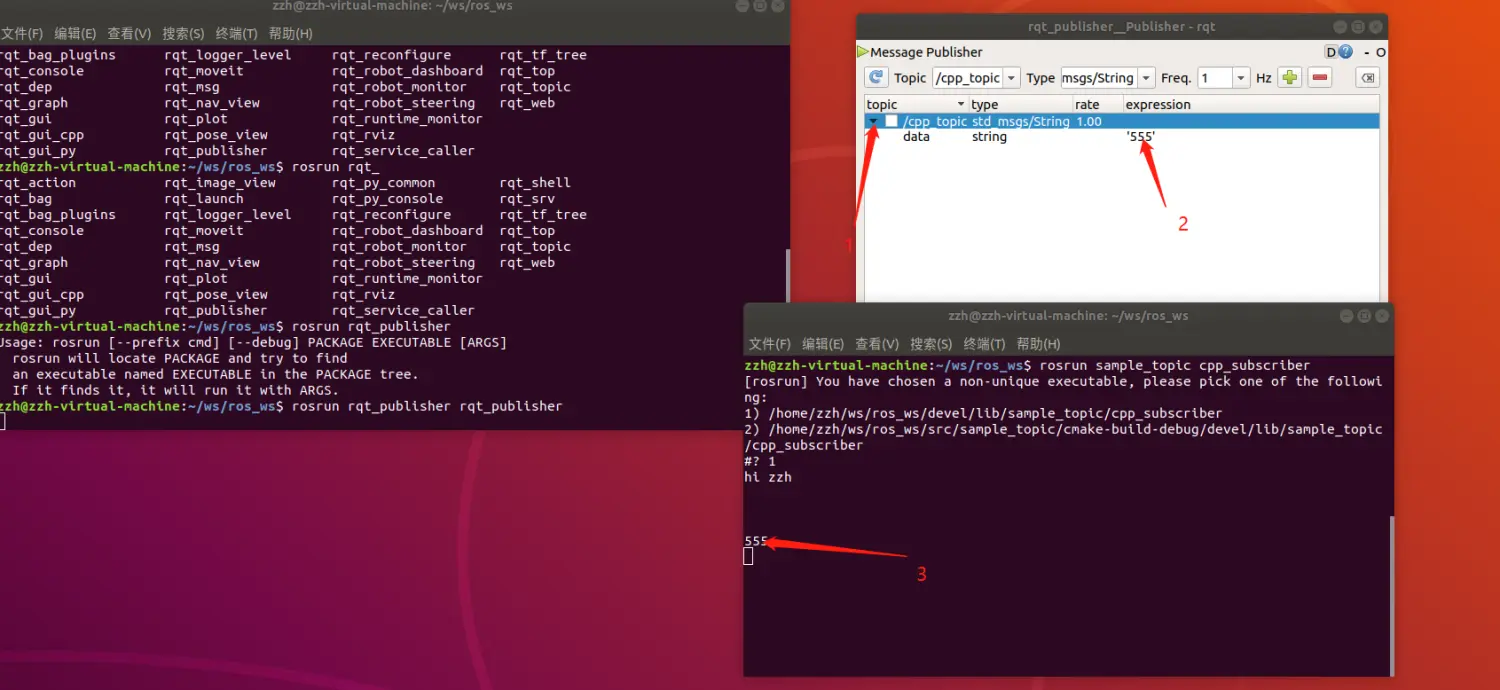
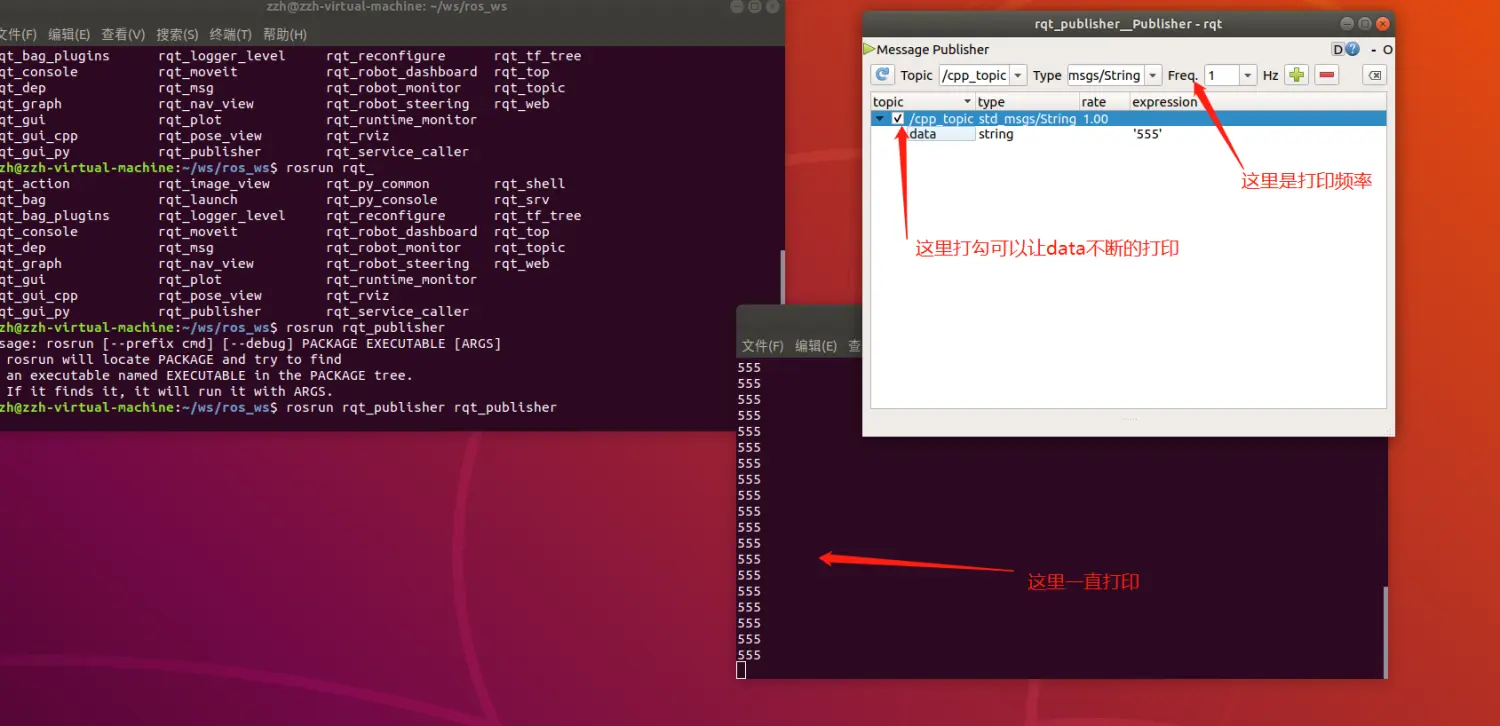
调试方式三:通过rqt_topic的ui的方式调试

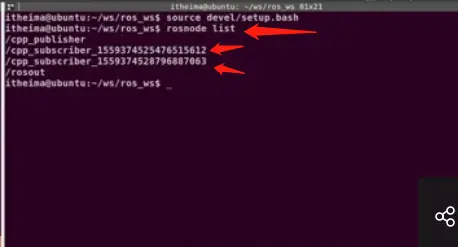
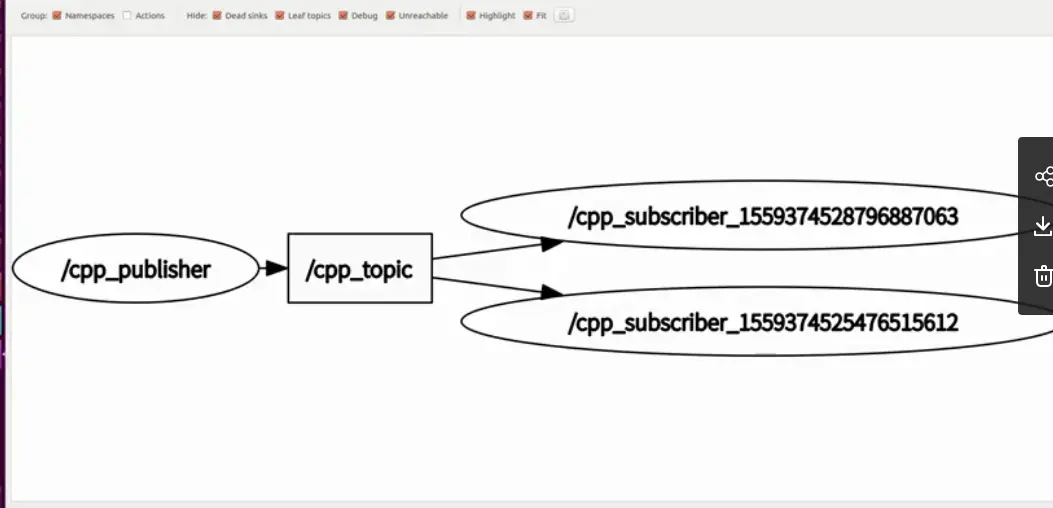
匿名节点的使用,如果不使用匿名节点的话,同时开两个subscriber是不行的。


















注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic







注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic





注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic
-
- 创建sample_msgs
- 创建sample_msgs
-
- 项目配置
- 项目配置
-
- 搭建项目
- 搭建项目
-
- 配置package.xml文件
<build_depend>message_generation</build_depend> --> <exec_depend>message_runtime</exec_depend> -->
- 配置package.xml文件
- 5.配置CMakeList文件
请对照截图做修改




find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
message_generation
)
add_message_files(
FILES
Student.msg
)
generate_messages(
DEPENDENCIES
std_msgs # Or other packages containing msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES sample_msgs
CATKIN_DEPENDS roscpp rosmsg rospy message_runtime
# DEPENDS system_lib
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
)


- 在sample_topic新增一个c++文件,里面的内容跟cpp_publisher.cpp文件一样,有修改的地方见步骤10
- 修改CMakeLists.txt文件
9.
重点,重点,重点!重要的事情说三遍!!!执行完以上步骤1~步骤8后,一定要把终端和CLion编译器全部都关掉重新启动,否则在cpp_msg_publisher.cpp引入包会没有提示。10.编写cpp_msg_publisher.cpp文件 - 使用rosrun rqt_topic rqt_topic调试




注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic




注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic



注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic



注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic
c++代码:






python代码:


注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic
python代码:


c++代码:



注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic












注意点1:每次新开一个新终端都要在ws/ros_ws下执行catkin_make编译一下,再执行source ./devdl/setup.bash配置下环境变量。
注意点2(如下图,这是python代码,c++也一样):
- 一:终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic py_subscriber.py
- 二(ui调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun rqt_topic rqt_topic
- 三:终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rostopic pub /py_topic std_msgs/String "data:'写入数据'"
- 四(ui调试):终端1:rosrun sample_topic py_subscriber.py一直打开 终端2:rosrun rqt_publisher rqt_publisher
- 五(模拟调试):终端1:rosrun sample_topic py_publisher.py 终端2:rosrun sample_topic echo /py_topic

// 打开终端:cd ws/ros_ws // 编译:catkin_make // 配置环境变量:source ./devel/setup.bash // roscd std_msgs // cd /opt/ros/melodic/share // 启动节点:rosrun turtlesim turtlesim_node
// 打开另一终端,cd ws/ros_ws // 编译:catkin_make // 配置环境变量:source ./devel/setup.bash // roscd std_msgs // cd /opt/ros/melodic/share // rosrun turtlesim tutle_teleop_key // 将小乌龟回到原点:rosservice call /reset
// 打开第三个终端,cd ws/ros_ws
// 编译:catkin_make
// 配置环境变量:source ./devel/setup.bash
// 通过命令查看当前的启动的节点:rosnode list
// 通过命令可以查看turtlesim节点的详情:rosnode info turtlesim
turtlesim节点存在一个订阅者,去/turtle1/cmd_vel主题中获取数据




geometry_msgs/Vector3 linear指的是线速度,小乌龟只用到了float64 x,代表着乌龟向前进的线速度。 geometry_msgs/Vector3 angular指的是角速度,小乌龟只用到了float64 z,代表着乌龟旋转的角速度。
-
- 通过命令行模拟数据发送

-
- 通过rqt_publisher工具模拟数据发送

// (1)创建工程:cd ws/ros_ws/src
catkin_create_pkg sample_turtle roscpp rospy rosmsg
// 打开工程,配置setting并删除Cmake-build-debug文件夹



rosrun sample_turtle turtle_control
// (4)实现了一个qt界面

// (1) 编写c++代码
#include "ros/ros.h"
#include<iostream>
#include <QtWidgets>
#include <QApplication>
using namespace std;
// 6. 回调函数
void sendClicked() {
cout << "clicked" << endl;
}
int main(int argc, char **argv) {
string nodeName = "turtle_control";
// 1.创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 2.创建Qt界面-可视框
QApplication app(argc, argv);
QWidget window;
// 2.创建Qt界面-主题和边框
window.setWindowTitle("小乌龟控制");
window.resize(400, 0);
// 3.layout布局
QFormLayout layout;
window.setLayout(&layout);
// 3(1)线速度
QLineEdit editLinear;
layout.addRow("线速度", &editLinear);
// 3 (2) 角速度
QLineEdit editAngular;
layout.addRow("角速度", &editAngular);
// 3 (3) button
QPushButton btnSend("发送");
layout.addRow(&btnSend);
// 3 (4). 点击事件
btnSend.connect(&btnSend, &QPushButton::clicked, &window, sendClicked);
// 4. 显示
window.show();
// 5. 执行
return app.exec();
}
// (2) 界面展示

//(1)编写c++代码
#include "ros/ros.h"
#include<iostream>
#include <QtWidgets>
#include <QApplication>
#include "geometry_msgs/Twist.h"
#include <math.h>
using namespace std;
// 8. 回调函数
void sendClicked(ros::Publisher &publisher, QLineEdit &editLinear, QLineEdit &editAngular) {
double x = editLinear.text().toDouble();
double z = editAngular.text().toDouble();
// 5.发送消息
geometry_msgs::Twist twist;
twist.linear.x = x;
twist.angular.z = z * M_PI / 180;
publisher.publish(twist);
}
int main(int argc, char **argv) {
string nodeName = "turtle_control";
string topicName = "turtle1/cmd_vel";
// 1.创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 4.创建publisher
ros::Publisher publisher = node.advertise<geometry_msgs::Twist>(topicName, 100);
// 2.创建Qt界面-可视框
QApplication app(argc, argv);
QWidget window;
// 2.创建Qt界面-主题和边框
window.setWindowTitle("小乌龟控制");
window.resize(400, 0);
// 3.layout布局
QFormLayout layout;
window.setLayout(&layout);
// 3(1)线速度
QLineEdit editLinear("0.0");
layout.addRow("线速度", &editLinear);
// 3 (2) 角速度
QLineEdit editAngular("0.0");
layout.addRow("角速度", &editAngular);
// 3 (3) button
QPushButton btnSend("发送");
layout.addRow(&btnSend);
// 3 (4). 点击事件
btnSend.connect(&btnSend, &QPushButton::clicked, &window, [&publisher, &editLinear, &editAngular]() {
sendClicked(publisher, editLinear, editAngular);
});
// 6. 显示
window.show();
// 7. 执行
return app.exec();
}
// (2) ui展示

// 创建工程,实现ui界面的代码,配置CMakeList文件
#include "ros/ros.h"
#include<iostream>
#include <QtWidgets>
#include <QApplication>
#include "geometry_msgs/Twist.h"
#include <math.h>
using namespace std;
// 8. 回调函数
void sendClicked(ros::Publisher &publisher, QLineEdit &editLinear, QLineEdit &editAngular) {
double x = editLinear.text().toDouble();
double z = editAngular.text().toDouble();
// 5.发送消息
geometry_msgs::Twist twist;
twist.linear.x = x;
twist.angular.z = z * M_PI / 180;
publisher.publish(twist);
}
int main(int argc, char **argv) {
string nodeName = "turtle_control2";
string topicName = "turtle1/cmd_vel";
// 1.创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 4.创建publisher
ros::Publisher publisher = node.advertise<geometry_msgs::Twist>(topicName, 100);
// 2.创建Qt界面-可视框
QApplication app(argc, argv);
QWidget window;
// 2.创建Qt界面-主题和边框
window.setWindowTitle("小乌龟控制");
window.resize(400, 0);
// 3.layout布局
QFormLayout layout;
window.setLayout(&layout);
// 3(1-1)线速度
QLineEdit editLinear("0.0");
layout.addRow("线速度", &editLinear);
// 3 (2-1) 角速度
QLineEdit editAngular("0.0");
layout.addRow("角速度", &editAngular);
// 3 (2-2) 坐标x
QLabel lbx;
layout.addRow("当前X坐标", &lbx);
// 3 (3-2) 坐标y
QLabel lby;
layout.addRow("当前Y坐标", &lby);
// 3 (4-2) 线速度
QLabel lbLinearVel;
layout.addRow("当前线速度", &lbLinearVel);
// 3 (5-2) 角速度
QLabel lbAngularVel;
layout.addRow("当前角速度", &lbAngularVel);
// 3 (6-2) 当前角度
QLabel lbTheta;
layout.addRow("当前角度", &lbTheta);
// 3 (3) button
QPushButton btnSend("发送");
layout.addRow(&btnSend);
// 3 (4). 点击事件
btnSend.connect(&btnSend, &QPushButton::clicked, &window, [&publisher, &editLinear, &editAngular]() {
sendClicked(publisher, editLinear, editAngular);
});
// 6. 显示
window.show();
// 7. 执行
return app.exec();
}


// 创建工程,实现ui界面的代码
#include "ros/ros.h"
#include<iostream>
#include <QtWidgets>
#include <QApplication>
#include "geometry_msgs/Twist.h"
#include <math.h>
#include "turtlesim/Pose.h"
using namespace std;
// 8. 回调函数
void sendClicked(ros::Publisher &publisher, QLineEdit &editLinear, QLineEdit &editAngular) {
double x = editLinear.text().toDouble();
double z = editAngular.text().toDouble();
// 5.发送消息
geometry_msgs::Twist twist;
twist.linear.x = x;
twist.angular.z = z * M_PI / 180;
publisher.publish(twist);
}
// 4. (4-2) 创建subscriber
//void Foo::callback(const std_msgs::Empty::ConstPtr& message) {}
void poseCallback(const turtlesim::Pose::ConstPtr &message) {
cout << "== == == == == == == == == == ==" << endl;
cout << message->x << endl;
cout << message->y << endl;
}
int main(int argc, char **argv) {
string nodeName = "turtle_control2";
string veltopicName = "turtle1/cmd_vel";
string posetopicName = "turtle1/pose";
// 1.创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 4. (4-3) 开启一个异步轮询器
ros::AsyncSpinner spinner(1);
spinner.start();
// 4.创建publisher
ros::Publisher publisher = node.advertise<geometry_msgs::Twist>(veltopicName, 100);
// 4. (4-1) 创建subscriber
const ros::Subscriber &subscriber = node.subscribe<turtlesim::Pose>(posetopicName, 100, poseCallback);
// 2.创建Qt界面-可视框
QApplication app(argc, argv);
QWidget window;
// 2.创建Qt界面-主题和边框
window.setWindowTitle("小乌龟控制");
window.resize(400, 0);
// 3.layout布局
QFormLayout layout;
window.setLayout(&layout);
// 3(1-1)线速度
QLineEdit editLinear("0.0");
layout.addRow("线速度", &editLinear);
// 3 (2-1) 角速度
QLineEdit editAngular("0.0");
layout.addRow("角速度", &editAngular);
// 3 (2-2) 坐标x
QLabel lbx;
layout.addRow("当前X坐标", &lbx);
// 3 (3-2) 坐标y
QLabel lby;
layout.addRow("当前Y坐标", &lby);
// 3 (4-2) 线速度
QLabel lbLinearVel;
layout.addRow("当前线速度", &lbLinearVel);
// 3 (5-2) 角速度
QLabel lbAngularVel;
layout.addRow("当前角速度", &lbAngularVel);
// 3 (6-2) 当前角度
QLabel lbTheta;
layout.addRow("当前角度", &lbTheta);
// 3 (3) button
QPushButton btnSend("发送");
layout.addRow(&btnSend);
// 3 (4). 点击事件
btnSend.connect(&btnSend, &QPushButton::clicked, &window, [&publisher, &editLinear, &editAngular]() {
sendClicked(publisher, editLinear, editAngular);
});
// 6. 显示
window.show();
// 7. 执行
return app.exec();
}

#include "ros/ros.h"
#include<iostream>
#include <QtWidgets>
#include <QApplication>
#include "geometry_msgs/Twist.h"
#include <math.h>
#include "turtlesim/Pose.h"
using namespace std;
QLabel *lbX;
QLabel *lbY;
QLabel *lbLinearVel;
QLabel *lbAngularVel;
QLabel *lbTheta;
// 8. 回调函数
void sendClicked(ros::Publisher &publisher, QLineEdit &editLinear, QLineEdit &editAngular) {
double x = editLinear.text().toDouble();
double z = editAngular.text().toDouble();
// 5.发送消息
geometry_msgs::Twist twist;
twist.linear.x = x;
twist.angular.z = z * M_PI / 180;
publisher.publish(twist);
}
// 4. (4-2) 创建subscriber
//void Foo::callback(const std_msgs::Empty::ConstPtr& message) {}
void poseCallback(const turtlesim::Pose::ConstPtr &message) {
lbX->setText(QString::fromStdString(to_string(message->x)));
lbY->setText(QString::fromStdString(to_string(message->y)));
lbLinearVel->setText(QString::fromStdString(to_string(message->linear_velocity)));
lbAngularVel->setText(QString::fromStdString(to_string(message->angular_velocity)));
lbTheta->setText(QString::fromStdString(to_string(message->theta * 180 / M_PI)));
}
int main(int argc, char **argv) {
string nodeName = "turtle_control2";
string veltopicName = "turtle1/cmd_vel";
string posetopicName = "turtle1/pose";
// 1.创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 4. (4-3) 开启一个异步轮询器
ros::AsyncSpinner spinner(1);
spinner.start();
// 4.创建publisher
ros::Publisher publisher = node.advertise<geometry_msgs::Twist>(veltopicName, 100);
// 4. (4-1) 创建subscriber
const ros::Subscriber &subscriber = node.subscribe<turtlesim::Pose>(posetopicName, 100, poseCallback);
// 2.创建Qt界面-可视框
QApplication app(argc, argv);
QWidget window;
// 2.创建Qt界面-主题和边框
window.setWindowTitle("小乌龟控制");
window.resize(400, 0);
// 3.layout布局
QFormLayout layout;
window.setLayout(&layout);
// 3(1-1)线速度
QLineEdit editLinear("0.0");
layout.addRow("线速度", &editLinear);
// 3 (2-1) 角速度
QLineEdit editAngular("0.0");
layout.addRow("角速度", &editAngular);
// 3 (2-2) 坐标x
lbX = new QLabel();
layout.addRow("当前X坐标", lbX);
// 3 (3-2) 坐标
lbY = new QLabel();
layout.addRow("当前Y坐标", lbY);
// 3 (4-2) 线速度
lbLinearVel = new QLabel();
layout.addRow("当前线速度", lbLinearVel);
// 3 (5-2) 角速度
lbAngularVel = new QLabel();
layout.addRow("当前角速度", lbAngularVel);
// 3 (6-2) 当前角度
lbTheta = new QLabel();
layout.addRow("当前角度", lbTheta);
// 3 (3) button
QPushButton btnSend("发送");
layout.addRow(&btnSend);
// 3 (4). 点击事件
btnSend.connect(&btnSend, &QPushButton::clicked, &window, [&publisher, &editLinear, &editAngular]() {
sendClicked(publisher, editLinear, editAngular);
});
// 6. 显示
window.show();
// 7. 执行
return app.exec();
}

#!/usr/bin/env python
# coding:utf-8
import rospy
from geometry_msgs.msg import Twist
from PyQt5.QtWidgets import *
import sys
import math
def btnClicked(editLinear, editAngluar, publisher):
linearX = float(editLinear.text())
angluarZ = float(editAngular.text())
# 创建消息
twist = Twist()
# 填充数据
twist.linear.x = linearX
twist.angular.z = angluarZ * math.pi / 180
# 发送消息
publisher.publish(twist)
if __name__ == '__main__':
nodeName = "turle_control";
topicName = "/turtle1/cmd_vel"
# 创建ros node
rospy.init_node(nodeName, anonymous=True)
# 创建publisher
publisher = rospy.Publisher(topicName, Twist, queue_size=1000)
# 创建Qt程序
app = QApplication(sys.argv)
# 创建窗体
window = QWidget()
window.setWindowTitle("小乌龟控制")
window.resize(400, 0)
# 设在布局
layout = QFormLayout()
window.setLayout(layout)
# 添加组件
editLinear = QLineEdit()
editLinear.setText("0.0")
layout.addRow("距离", editLinear)
editAngular = QLineEdit()
editAngular.setText("0.0")
layout.addRow("角度", editAngular)
btnSend = QPushButton("发送")
layout.addRow(btnSend)
# 事件
btnSend.clicked.connect(lambda: btnClicked(editLinear, editAngular, publisher))
window.show()
sys.exit(app.exec_())

- 配置文件
- 编写c++服务端代码

#include "ros/ros.h"
#include<iostream>
#include <QtWidgets>
#include <QApplication>
#include "std_srvs/Empty.h"
using namespace std;
void clickReset(ros::NodeHandle &node) {
ROS_INFO_STREAM("clicke reset");
string serviceName = "/reset";
ros::ServiceClient client = node.serviceClient<std_srvs::Empty>(serviceName);
std_srvs::Empty msg;
client.call(msg);
client.shutdown();
}
int main(int argc, char **argv) {
string nodeName = "turtle_service_control";
// 1.创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
//构建Qt界面
QApplication app(argc, argv);
// window
QWidget window;
window.resize(400, 0);
// layout
QFormLayout layout;
window.setLayout(&layout);
QPushButton btnReset("重置");
layout.addRow(&btnReset);
QLineEdit editR("0");
layout.addRow("红色", &editR);
QLineEdit editG("0");
layout.addRow("绿色", &editG);
QLineEdit editB("0");
layout.addRow("蓝色", &editB);
QPushButton btnChangeColor("改变画笔颜色");
layout.addRow(&btnChangeColor);
QLineEdit editX("0");
layout.addRow("X坐标", &editX);
QLineEdit editY("0");
layout.addRow("Y坐标", &editY);
QLineEdit editTheta("0");
layout.addRow("角度", &editTheta);
QPushButton btnSetXY("设置位置");
layout.addRow(&btnSetXY);
// 点击事件
btnReset.connect(&btnReset, &QPushButton::clicked, &window, bind(clickReset,node));
window.show();
return app.exec();
}
- 调试

- c++代码实现
#include "ros/ros.h"
#include<iostream>
#include <QtWidgets>
#include <QApplication>
#include "std_srvs/Empty.h"
#include "turtlesim/SetPen.h"
using namespace std;
void clickReset(ros::NodeHandle &node) {
ROS_INFO_STREAM("clicke reset");
string serviceName = "/reset";
ros::ServiceClient client = node.serviceClient<std_srvs::Empty>(serviceName);
std_srvs::Empty msg;
client.call(msg);
client.shutdown();
}
void clickChangeColor(ros::NodeHandle &node, QLineEdit *editR, QLineEdit *editG, QLineEdit *editB) {
string serviceName = "/turtle1/set_pen";
uint r = editR->text().toUInt();
uint g = editG->text().toUInt();
uint b = editB->text().toUInt();
ros::ServiceClient client = node.serviceClient<turtlesim::SetPen>(serviceName);
turtlesim::SetPen srv;
srv.request.r = r;
srv.request.g = g;
srv.request.b = b;
srv.request.width = 4;
client.call(srv);
client.shutdown();
}
int main(int argc, char **argv) {
string nodeName = "turtle_service_control";
// 1.创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
//构建Qt界面
QApplication app(argc, argv);
// window
QWidget window;
window.resize(400, 0);
// layout
QFormLayout layout;
window.setLayout(&layout);
QPushButton btnReset("重置");
layout.addRow(&btnReset);
QLineEdit editR("0");
layout.addRow("红色", &editR);
QLineEdit editG("0");
layout.addRow("绿色", &editG);
QLineEdit editB("0");
layout.addRow("蓝色", &editB);
QPushButton btnChangeColor("改变画笔颜色");
layout.addRow(&btnChangeColor);
QLineEdit editX("0");
layout.addRow("X坐标", &editX);
QLineEdit editY("0");
layout.addRow("Y坐标", &editY);
QLineEdit editTheta("0");
layout.addRow("角度", &editTheta);
QPushButton btnSetXY("设置位置");
layout.addRow(&btnSetXY);
// 事件
btnReset.connect(&btnReset, &QPushButton::clicked, &window, bind(clickReset, node));
btnChangeColor.connect(&btnChangeColor, &QPushButton::clicked, &window, bind(clickChangeColor, node,&editR,&editG,&editB));
window.show();
return app.exec();
}
- 调试

- c++代码实现
#include "ros/ros.h"
#include<iostream>
#include <QtWidgets>
#include <QApplication>
#include "std_srvs/Empty.h"
#include "turtlesim/SetPen.h"
#include "turtlesim/TeleportAbsolute.h"
using namespace std;
// 设置点击重置的回调函数
void clickReset(ros::NodeHandle &node) {
ROS_INFO_STREAM("clicke reset");
string serviceName = "/reset";
ros::ServiceClient client = node.serviceClient<std_srvs::Empty>(serviceName);
std_srvs::Empty msg;
client.call(msg);
client.shutdown();
}
// 设置点击改变颜色的回调函数
void clickChangeColor(ros::NodeHandle &node, QLineEdit *editR, QLineEdit *editG, QLineEdit *editB) {
string serviceName = "/turtle1/set_pen";
uint r = editR->text().toUInt();
uint g = editG->text().toUInt();
uint b = editB->text().toUInt();
ros::ServiceClient client = node.serviceClient<turtlesim::SetPen>(serviceName);
turtlesim::SetPen srv;
srv.request.r = r;
srv.request.g = g;
srv.request.b = b;
srv.request.width = 4;
client.call(srv);
client.shutdown();
}
// 设置点击改变小乌龟位置的回调函数
void clickSetXY(ros::NodeHandle &node, QLineEdit *editX, QLineEdit *editY, QLineEdit *editTheta) {
string serviceName = "/turtle1/teleport_absolute";
float x = editX->text().toFloat();
float y = editY->text().toFloat();
float theta = editTheta->text().toFloat() * M_PI / 180;
ros::ServiceClient client = node.serviceClient<turtlesim::TeleportAbsolute>(serviceName);
turtlesim::TeleportAbsolute srv;
srv.request.x = x;
srv.request.y = y;
srv.request.theta = theta;
client.call(srv);
client.shutdown();
}
int main(int argc, char **argv) {
string nodeName = "turtle_service_control";
// 1.创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
//构建Qt界面
QApplication app(argc, argv);
// window
QWidget window;
window.resize(400, 0);
// layout
QFormLayout layout;
window.setLayout(&layout);
QPushButton btnReset("重置");
layout.addRow(&btnReset);
QLineEdit editR("0");
layout.addRow("红色", &editR);
QLineEdit editG("0");
layout.addRow("绿色", &editG);
QLineEdit editB("0");
layout.addRow("蓝色", &editB);
QPushButton btnChangeColor("改变画笔颜色");
layout.addRow(&btnChangeColor);
QLineEdit editX("0");
layout.addRow("X坐标", &editX);
QLineEdit editY("0");
layout.addRow("Y坐标", &editY);
QLineEdit editTheta("0");
layout.addRow("角度", &editTheta);
QPushButton btnSetXY("设置位置");
layout.addRow(&btnSetXY);
// 重置小乌龟事件
btnReset.connect(&btnReset, &QPushButton::clicked, &window, bind(clickReset, node));
// 改变颜色事件
btnChangeColor.connect(&btnChangeColor, &QPushButton::clicked, &window,
bind(clickChangeColor, node, &editR, &editG, &editB));
// 改变小乌龟位置事件
btnSetXY.connect(&btnSetXY, &QPushButton::clicked, &window,
bind(clickSetXY, node, &editX, &editY, &editTheta));
window.show();
return app.exec();
}
- 调试



日志级别的划分:
| 级别 | 描述 |
|---|---|
DEBUG |
调试日志,供开发测试使用 |
INFO |
常规日志,用户可见级别的信息 |
WARN |
警告信息。 |
ERROR |
错误信息。程序出错后打印的信息 |
FATAL |
致命错误。出现宕机的日志记录 |
日志可见等级顺序是:
DEBUG > INFO > WARN > ERROR > FATAL
通常程序在运行时,都会设置一个日志等级,默认等级时INFO。
-
假如将当前程序日志等级设置为
DEBUG,可查看到的日志信息包含:DEBUG,INFO,WARN,ERROR,FATAL -
假如将当前程序日志等级设置为
INFO,可查看到的日志信息包含:INFO,WARN,ERROR,FATAL -
假如将当前程序日志等级设置为
WARN,可查看到的日志信息包含:WARN,ERROR,FATAL -
假如将当前程序日志等级设置为
ERROR,可查看到的日志信息包含:ERROR,FATAL -
假如将当前程序日志等级设置为
FATAL,可查看到的日志信息包含:FATAL
#C++日志API
在ROS系统中,提供了常规API供我们使用
基础API格式:
ROS_DEBUG("打印的内容");
ROS_INFO("打印的内容");
ROS_WARN("打印的内容");
ROS_ERROR("打印的内容");
ROS_FATAL("打印的内容");
stream API格式:
ROS_DEBUG_STREAM("打印的内容" << "hello");
ROS_INFO_STREAM("打印的内容" << "hello");
ROS_WARN_STREAM("打印的内容" << "hello");
ROS_ERROR_STREAM("打印的内容" << "hello");
ROS_FATAL_STREAM("打印的内容" << "hello");
#Python日志API
rospy.logdebug("打印的内容")
rospy.loginfo("打印的内容")
rospy.logwarn("打印的内容")
rospy.logerror("打印的内容")
rospy.logfatal("打印的内容")
#日志查看系统
我们可以时使用rqt_console命令来查看过滤日志
rosrun rqt_console rqt_console

#日志级别设置
通过右上角的设置按钮进入进行日志级别的设置:


#日志级别过滤





-
创建工程
-
配置package.xml文件 在package.xml种添加如下配置:

<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
message_generation是消息生成工具,在打包编译时会用到
message_runtime运行时消息处理工具
- 配置CMakeLists.txt
在
find_package添加message_generation,结果如下:
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
message_generation
)
添加add_message_file,结果如下:
add_service_files(
FILES
NumOption.srv
)
这里的NumOption.srv要和你创建的srv文件名称一致,且必须时在srv目录下,否则编译会出现问题
添加generation_msg,结果如下:
generate_messages(
DEPENDENCIES
std_msgs
)
这个配置的作用是添加生成消息的依赖,默认的时候要添加std_msgs
修改catkin_package,结果如下:
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo_msg
# CATKIN_DEPENDS roscpp rosmsg rospy
# DEPENDS system_lib
CATKIN_DEPENDS message_runtime
)
- 通过rossrv工具校验
rossrv show demo_srvs/NumOption
- 创建工程
- 配置package.xml文件
- 配置CMakeLists.txt
- 编写c++代码



#include "ros/ros.h"
#include<iostream>
#include "sample_srvs/NumOption.h"
using namespace std;
//bool Foo::callback(std_srvs::Empty& request, std_srvs::Empty& response)
//{
// return true;
//}
// 3. 回调函数
bool callback(sample_srvs::NumOptionRequest &request, sample_srvs::NumOptionResponse &response) {
// 4. 运算逻辑
long a = request.a;
long b = request.b;
string option = request.option;
long result = 0;
if ("+" == option) {
result = a + b;
} else if ("-" == option) {
result = a - b;
} else if ("*" == option) {
result = a * b;
} else if ("/" == option) {
result = a / b;
} else if ("%" == option) {
result = a % b;
}
response.result = result;
return true;
}
int main(int argc, char **argv) {
string nodeName = "service_server";
string service = "/server/add";
// 1. init node
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 2. 创建Server端 std::string& service, bool(T::*srv_func)(MReq &, MRes &), T *obj)
const ros::ServiceServer &server = node.advertiseService(service, callback);
// 5. 阻塞
ros::spin();
return 0;
}
如果遇到#include"sample_srvs"的包一直没有自动显示,则重新打开工程


-
创建工程
-
配置CMakeList文件
-
编写c++代码


#include "ros/ros.h"
#include<iostream>
#include "sample_srvs/NumOption.h"
using namespace std;
int main(int argc, char **argv) {
string nodeName = "service_client";
string service = "/server/option";
// 1. init node
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 2. 通过Node创建Client端
ros::ServiceClient client = node.serviceClient<sample_srvs::NumOption>(service);
// 3. 访问服务器
sample_srvs::NumOption srv;
srv.request.a = 10;
srv.request.b = 5;
srv.request.option = "+";
// 4. 调用srv
client.call(srv);
// 5. 打印结果
ROS_INFO_STREAM("result:" << srv.response.result);
return 0;
}
- 调试

- python代码
# /usr/bin env python
# encoding:utf-8
import rospy
from sample_srvs.srv import NumOption, NumOptionRequest, NumOptionResponse
# 3. 逻辑运算
def handler(request):
a = request.a
b = request.b
option = request.option
result = 0
if "+" == option:
result = a + b
elif "-" == option:
result = a - b
elif "*" == option:
result = a * b
elif "/" == option:
result == a / b
elif "%" == option:
result == a % b
return result
if __name__ == '__main__':
# 1-2. 节点名称
nodeName = "service_server"
# 2-2. 服务名称
serviceName = "/service/option"
# 1-1. init node
rospy.init_node(nodeName)
# 2-1. 创建service
rospy.Service(serviceName, NumOption, handler)
# 4. 阻塞
rospy.spin()
- 调试

- python代码
# /usr/bin env python
# encoding:utf-8
import rospy
from sample_srvs.srv import NumOption, NumOptionRequest, NumOptionResponse
if __name__ == '__main__':
# 1-2. 节点名称
nodeName = "service_client"
# 2-2. 访问地址
serviceName = "/service/option"
# 1-1. init node
rospy.init_node(nodeName)
# 2-1. 创建service的client端
client = rospy.ServiceProxy(serviceName, NumOption)
response = client(a=10, b=2, option="*")
# 3.
rospy.loginfo(response)
- 创建GetStuId.srv文件
- 检验是否创建完成
- 编写c++服务端代码


#include "ros/ros.h"
#include<iostream>
#include "sample_srvs/GetStuId.h"
#include "sample_msgs/Student.h"
using namespace std;
//bool Foo::callback(std_srvs::Empty& request, std_srvs::Empty& response)
//{
// return true;
//}
// 3. 回调函数
bool callback (sample_srvs::GetStuIdRequest &request,sample_srvs::GetStuIdResponse &response){
// 4. request是客户端给服务端发送的数据
sample_msgs::Student student = request.student;
response.stuId = student.name + to_string(student.age);
return true;
}
int main(int argc, char **argv) {
// 创建节点名称
string nodeName = "service_server";
// 访问地址
string service = "/server/getstuid";
// 1. init node
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 2. 创建server
const ros::ServiceServer &server = node.advertiseService(service, callback);
// 5. 阻塞
ros::spin();
return 0;
}
- 配置CMakeList.txt文件
- 调试


- python客户端代码
# /usr/bin env python
# encoding:utf-8
import rospy
from sample_srvs.srv import GetStuId
from sample_msgs.msg import Student
if __name__ == '__main__':
# 1-2. 节点名称
nodeName = "service_client"
# 2-2. 访问地址
serviceName = "server/getstuid"
# 1-1. init node
rospy.init_node(nodeName)
# 2-1. 创建service的client端
client = rospy.ServiceProxy(serviceName, GetStuId)
response = client(student = Student(name = "zhangsan",age = 19))
# 3.
rospy.loginfo(response)
- sample_srvs相关配置
- python服务端代码

# /usr/bin env python
# encoding:utf-8
import rospy
from sample_srvs.srv import GetTeam, GetTeamResponse
from sample_msgs.msg import Student
from std_msgs.msg import String
# 3. 逻辑
def handler(request):
name = request.name
response = GetTeamResponse()
response.members = []
response.members.append(Student(name="zhangsan", age=15))
response.members.append(Student(name="lisi", age=16))
response.members.append(Student(name="wangwu", age=17))
response.leader = Student(name="zhaoliu", age=18)
response.info = String(data="team information")
return response
if __name__ == '__main__':
# 1-2. 节点名称
nodeName = "service_server"
# 2-2. 服务名称
serviceName = "/service/getteam"
# 1-1. init node
rospy.init_node(nodeName)
# 2-1. 创建service
rospy.Service(serviceName, GetTeam, handler)
rospy.spin()
- c++客户端代码编写
#include "ros/ros.h"
#include<iostream>
#include <vector>
#include "sample_srvs/GetTeam.h"
#include "sample_msgs/Student.h"
#include "std_msgs/String.h"
using namespace std;
int main(int argc, char **argv) {
string nodeName = "service_client";
string service = "/service/getteam";
// 1. init node
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 2. 通过Node创建Client端
ros::ServiceClient client = node.serviceClient<sample_srvs::GetTeam>(service);
// 3. 访问服务器
sample_srvs::GetTeam srv;
srv.request.name = "wangwu";
// 4. 调用srv
client.call(srv);
sample_srvs::GetTeam::Response &response = srv.response;
vector<sample_msgs::Student> &members = response.members;
sample_msgs::Student leader = response.leader;
std_msgs::String info = response.info;
return 0;
}
-
创建工程 cd ws/ros_ws/src catkin_create_pkg sample_robot roscpp rospy rosmsg
-
配置CMakeLists文件
cmake_minimum_required(VERSION 2.8.3)
project(sample_robot)
## Compile as C++11, supported in ROS Kinetic and newer
add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
)
##############################################################################
# Qt Environment
##############################################################################
set(CMAKE_INCLUDE_CURRENT_DIR ON)
set(CMAKE_AUTOMOC ON)
find_package(Qt5 COMPONENTS Core Gui Widgets PrintSupport)
##############################################################################
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs # Or other packages containing msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES sample_robot
# CATKIN_DEPENDS roscpp rosmsg rospy
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/sample_robot.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/sample_robot_node.cpp)
add_executable(robot1 src/robot1.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
target_link_libraries(
robot1
${catkin_LIBRARIES}
Qt5::Core
Qt5::Gui
Qt5::Widgets
Qt5::PrintSupport
)
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# install(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables and/or libraries for installation
# install(TARGETS ${PROJECT_NAME} ${PROJECT_NAME}_node
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_sample_robot.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
- 编写c++代码
#include <iostream>
#include "ros/ros.h"
#include "QApplication"
#include "QtWidgets"
using namespace std;
void clickDone(QLineEdit *xEdit, QLineEdit *yEdit) {
double distX = xEdit->text().toDouble();
double distY = yEdit->text().toDouble();
ROS_INFO_STREAM("distX: " << distX << " distY:" << distY);
}
int main(int argc, char **argv) {
string nodeName = "turtle_control";
// 创建节点
ros::init(argc, argv, nodeName, ros::init_options::AnonymousName);
ros::NodeHandle node;
// 创建Qt程序
QApplication app(argc, argv);
//窗体
QWidget window;
window.setWindowTitle("小乌龟控制器");
window.resize(400, 0);
//布局
QFormLayout layout;
window.setLayout(&layout);
// 目标x坐标
QLineEdit xEdit("10.54444");
layout.addRow("目标x坐标", &xEdit);
// 目标y坐标
QLineEdit yEdit("5.54444");
layout.addRow("目标y坐标", &yEdit);
//当前姿态坐标信息
QHBoxLayout poseLayout;
layout.addRow(&poseLayout);
QFormLayout xLayout;
QLabel xLb;
xLayout.addRow("x坐标", &xLb);
poseLayout.addLayout(&xLayout);
QFormLayout yLayout;
QLabel yLb;
yLayout.addRow("y坐标", &yLb);
poseLayout.addLayout(&yLayout);
QFormLayout thetaLayout;
QLabel thetaLb;
thetaLayout.addRow("角度", &thetaLb);
poseLayout.addLayout(&thetaLayout);
// 执行按钮
QPushButton btnDone("执行");
layout.addRow(&btnDone);
// 事件设置
btnDone.connect(&btnDone, &QPushButton::clicked,&window,bind(&clickDone, &xEdit, &yEdit));
window.show();
return app.exec();
}
- 调试

- 编写c++代码
#include <iostream>
#include "ros/ros.h"
#include "QApplication"
#include "QtWidgets"
#include "geometry_msgs/Twist.h"
#include "turtlesim/Pose.h"
using namespace std;
void clickDone(QLineEdit *xEdit, QLineEdit *yEdit) {
double distX = xEdit->text().toDouble();
double distY = yEdit->text().toDouble();
ROS_INFO_STREAM("distX: " << distX << " distY:" << distY);
}
void poseCallback(const turtlesim::Pose::ConstPtr &msg, QLabel *xLb, QLabel *yLb, QLabel *thetaLb) {
// ROS_INFO_STREAM("x: " << msg->x);
// ROS_INFO_STREAM("y: " << msg->y);
// ROS_INFO_STREAM("theta: " << msg->theta);
// ROS_INFO_STREAM("linear: " << msg->linear_velocity);
// ROS_INFO_STREAM("angular: " << msg->angular_velocity);
// ROS_INFO_STREAM("degrees: " << msg->theta * 180 / M_PI);
// ROS_INFO_STREAM("=========================================");
xLb->setText(QString::fromStdString(to_string(msg->x)));
yLb->setText(QString::fromStdString(to_string(msg->y)));
thetaLb->setText(QString::fromStdString(to_string(msg->theta * 180 / M_PI)));
}
int main(int argc, char **argv) {
string nodeName = "turtle_control";
// 创建节点
ros::init(argc, argv, nodeName, ros::init_options::AnonymousName);
ros::NodeHandle node;
// 创建Qt程序
QApplication app(argc, argv);
//窗体
QWidget window;
window.setWindowTitle("小乌龟控制器");
window.resize(400, 0);
//布局
QFormLayout layout;
window.setLayout(&layout);
// 目标x坐标
QLineEdit xEdit("10.54444");
layout.addRow("目标x坐标", &xEdit);
// 目标y坐标
QLineEdit yEdit("5.54444");
layout.addRow("目标y坐标", &yEdit);
//当前姿态坐标信息
QHBoxLayout poseLayout;
layout.addRow(&poseLayout);
QFormLayout xLayout;
QLabel xLb;
xLayout.addRow("x坐标", &xLb);
poseLayout.addLayout(&xLayout);
QFormLayout yLayout;
QLabel yLb;
yLayout.addRow("y坐标", &yLb);
poseLayout.addLayout(&yLayout);
QFormLayout thetaLayout;
QLabel thetaLb;
thetaLayout.addRow("角度", &thetaLb);
poseLayout.addLayout(&thetaLayout);
// 执行按钮
QPushButton btnDone("执行");
layout.addRow(&btnDone);
// 事件设置
btnDone.connect(&btnDone, &QPushButton::clicked, &window, bind(&clickDone, &xEdit, &yEdit));
window.show();
ros::AsyncSpinner spinner(1);
spinner.start();
//小乌龟控制地址
string velTopicName = "/turtle1/cmd_vel";
//小乌龟数据获得
string poseTopicName = "/turtle1/pose";
// 创建小乌龟移动发布者
ros::Publisher &&publisher = node.advertise<geometry_msgs::Twist>(velTopicName, 1000);
// 创建小乌龟位置的订阅者
const ros::Subscriber &subscriber = node.subscribe<turtlesim::Pose>(poseTopicName, 1000,
bind(poseCallback, _1, &xLb, &yLb, &thetaLb));
return app.exec();
}
- 调试

- 编写c++代码
#include <iostream>
#include "ros/ros.h"
#include "QApplication"
#include "QtWidgets"
#include "geometry_msgs/Twist.h"
#include "turtlesim/Pose.h"
using namespace std;
turtlesim::Pose::ConstPtr pose;
double calcDistance(double srcX, double srcY, double distX, double distY) {
return sqrt(pow(srcX - distX, 2) + pow(srcY - distY, 2));
}
void clickDone(QLineEdit *xEdit, QLineEdit *yEdit, ros::Publisher publisher) {
double distX = xEdit->text().toDouble();
double distY = yEdit->text().toDouble();
ROS_INFO_STREAM("distX: " << distX << " distY:" << distY);
double srcX = pose->x;
double srcY = pose->y;
double linearDistance = calcDistance(srcX, srcY, distX, distY);
double time = 5;
double linearVel = linearDistance / time;
/*
* 、// 方案一:
ros::Rate rate(1);
for (int i = 0; i < 5; ++i) {
geometry_msgs::Twist twist;
twist.linear.x = linearVel;
twist.angular.z = 0;
publisher.publish(twist);
rate.sleep();
}
*/
double hz = 10;
ros::Rate rate(hz);
double runDistance = 0;
double startTime = ros::Time::now().toSec();
while (runDistance < linearDistance) {
geometry_msgs::Twist twist;
twist.linear.x = linearVel;
twist.angular.z = 0;
publisher.publish(twist);
rate.sleep();
runDistance += linearVel * 1 / hz;
}
double endTime = ros::Time::now().toSec();
ROS_DEBUG_STREAM(" cost: "<<(endTime - startTime)));
// 停止
geometry_msgs::Twist twist;
twist.linear.x = 0;
twist.angular.z = 0;
publisher.publish(twist);
}
void poseCallback(const turtlesim::Pose::ConstPtr &msg, QLabel *xLb, QLabel *yLb, QLabel *thetaLb) {
// ROS_INFO_STREAM("x: " << msg->x);
// ROS_INFO_STREAM("y: " << msg->y);
// ROS_INFO_STREAM("theta: " << msg->theta);
// ROS_INFO_STREAM("linear: " << msg->linear_velocity);
// ROS_INFO_STREAM("angular: " << msg->angular_velocity);
// ROS_INFO_STREAM("degrees: " << msg->theta * 180 / M_PI);
// ROS_INFO_STREAM("=========================================");
pose = msg;
xLb->setText(QString::fromStdString(to_string(msg->x)));
yLb->setText(QString::fromStdString(to_string(msg->y)));
thetaLb->setText(QString::fromStdString(to_string(msg->theta * 180 / M_PI)));
}
int main(int argc, char **argv) {
string nodeName = "turtle_control";
// 创建节点
ros::init(argc, argv, nodeName, ros::init_options::AnonymousName);
ros::NodeHandle node;
// 创建Qt程序
QApplication app(argc, argv);
//窗体
QWidget window;
window.setWindowTitle("小乌龟控制器");
window.resize(400, 0);
//布局
QFormLayout layout;
window.setLayout(&layout);
// 目标x坐标
QLineEdit xEdit("10.54444");
layout.addRow("目标x坐标", &xEdit);
// 目标y坐标
QLineEdit yEdit("5.54444");
layout.addRow("目标y坐标", &yEdit);
//当前姿态坐标信息
QHBoxLayout poseLayout;
layout.addRow(&poseLayout);
QFormLayout xLayout;
QLabel xLb;
xLayout.addRow("x坐标", &xLb);
poseLayout.addLayout(&xLayout);
QFormLayout yLayout;
QLabel yLb;
yLayout.addRow("y坐标", &yLb);
poseLayout.addLayout(&yLayout);
QFormLayout thetaLayout;
QLabel thetaLb;
thetaLayout.addRow("角度", &thetaLb);
poseLayout.addLayout(&thetaLayout);
// 执行按钮
QPushButton btnDone("执行");
layout.addRow(&btnDone);
window.show();
ros::AsyncSpinner spinner(1);
spinner.start();
//小乌龟控制地址
string velTopicName = "/turtle1/cmd_vel";
//小乌龟数据获得
string poseTopicName = "/turtle1/pose";
// 创建小乌龟移动发布者
ros::Publisher &&publisher = node.advertise<geometry_msgs::Twist>(velTopicName, 1000);
// 创建小乌龟位置的订阅者
const ros::Subscriber &subscriber = node.subscribe<turtlesim::Pose>(poseTopicName, 1000,
bind(poseCallback, _1, &xLb, &yLb, &thetaLb));
// 事件设置
btnDone.connect(&btnDone, &QPushButton::clicked, &window, bind(&clickDone, &xEdit, &yEdit, publisher));
return app.exec();
}
- 调试

- 配置sample_action_msgs/action/CountNumber.action
- 编写服务端c++代码

#include "ros/ros.h"
#include <iostream>
#include "actionlib/client/simple_action_client.h"
#include "actionlib/client/simple_client_goal_state.h"
#include "sample_action_msgs/CountNumberAction.h"
#include "actionlib/client/simple_action_client.h"
using namespace std;
void done_cb(const actionlib::SimpleClientGoalState &state,
const sample_action_msgs::CountNumberResult::ConstPtr &result,
const actionlib::SimpleActionClient<sample_action_msgs::CountNumberAction> * client) {
if (state == state.ABORTED) {
ROS_INFO("server working error, don't finish my job.");
} else if (state == state.PREEMPTED) {
ROS_INFO("client cancel job.");
} else if (state == state.SUCCEEDED) {
ROS_INFO("server finish job.");
ROS_INFO_STREAM("result: " << result->count);
}
}
void active_cb() {
ROS_INFO_STREAM("active callback");
}
void feedback_cb(const sample_action_msgs::CountNumberFeedback::ConstPtr &feedback) {
ROS_INFO_STREAM("percent: " << feedback->percent);
}
int main(int argc, char **argv) {
// 定义
string nodeName = "simple_action_client";
string actionName = "/CountNumber";
// 初始化
ros::init(argc, argv, nodeName, ros::init_options::AnonymousName);
ros::NodeHandle node;
// 创建SimpleActionClient
actionlib::SimpleActionClient<sample_action_msgs::CountNumberAction> &&client =
actionlib::SimpleActionClient<sample_action_msgs::CountNumberAction>(node, actionName);
// 等待服务器启动
client.waitForServer();
// 发送Goal
sample_action_msgs::CountNumberGoal goal;
goal.max = 100;
goal.duration = 1;
client.sendGoal(goal,
boost::bind(done_cb, _1, _2, &client),
boost::bind(active_cb),
boost::bind(feedback_cb, _1));
ros::spin();
return 0;
}
- 调试





{kind=link}