Comments (3)
 sherm1
commented on June 8, 2024
sherm1
commented on June 8, 2024
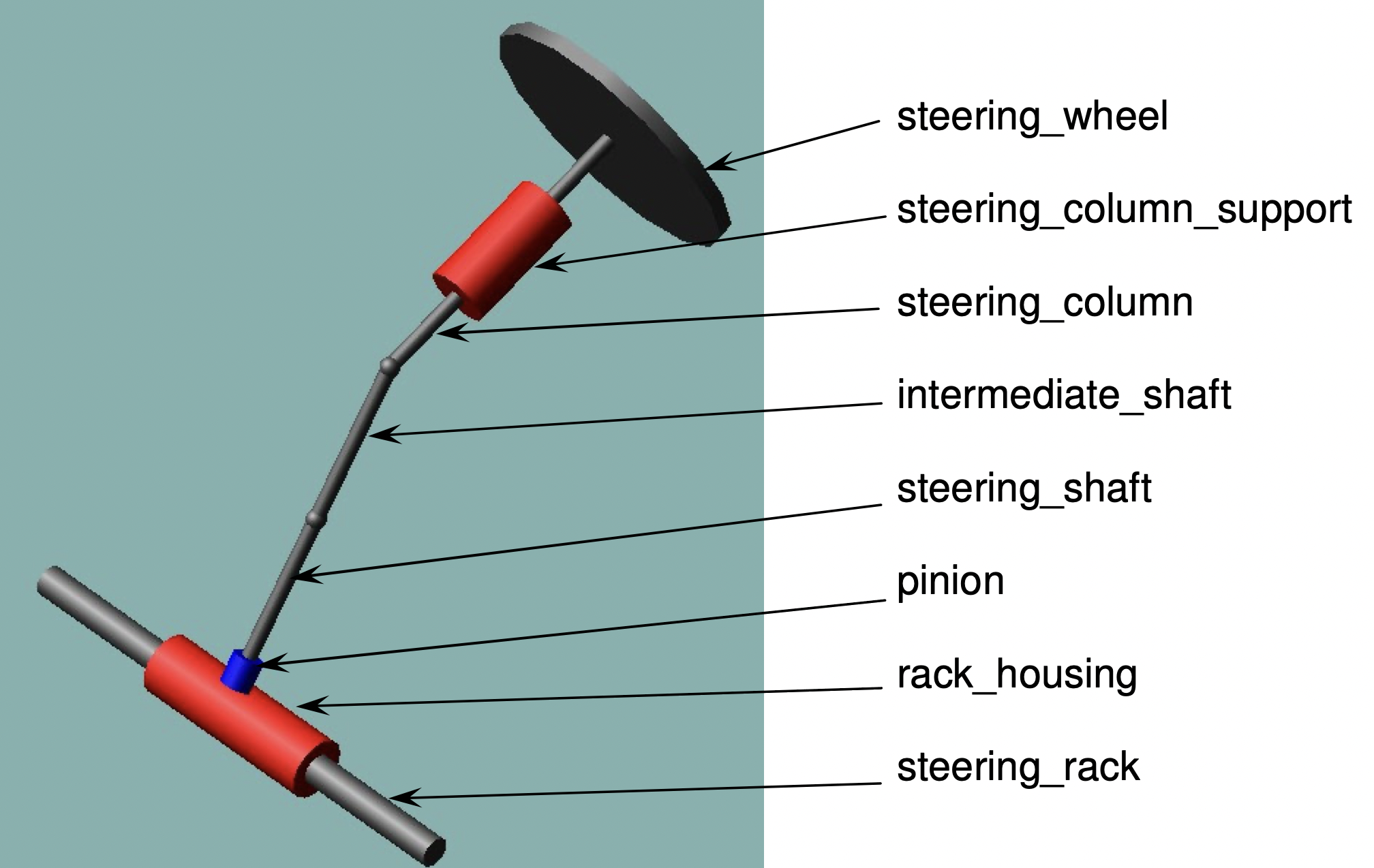
A rack and pinion (and other geared systems) can be expressed by modeling the joints as mobilizers and the gear with a coupler constraint. Even that is a simplification since, although it models the motion correctly, it does not accurately capture the reaction forces at the gear contact (which produce measurable reactions elsewhere). It is not obvious to me how the entire mechanism could be replaced by a mobilizer. Recall from the paper that a mobilizer is a relationship between two bodies, defined by a transform function and related hinge matrix. Although not clear from the illustration above, a rack and pinion is a relation among three bodies -- the shaft, the rack, and the case (the shaft rotates wrt the case; the rack translates wrt the case. So to me that looks like two mobilizers plus a constraint.
In contrast a screw joint is a relation between only two bodies and is easily modeled as a mobilizer.
Do you see a way to model the rack & pinion as a single mobilizer?
from simbody.
 MarvinSt
commented on June 8, 2024
MarvinSt
commented on June 8, 2024
Yes, you are correct. A rack-pinion system will require a support body to weld the revolute joint to. I see that this is not required for the screw mobilizer.
I solved it now as follows, not sure if there is a better / more convenient way:
auto steering_rack = MobilizedBody::Slider(chassis_body, Transform(FromDirectionVector(steering_rack_dir, XAxis), PosWorldToBody(chassis_body, steering_rack_pos)), steeringRackInfo, Transform(Vec3(0)));
auto steering_shaft = MobilizedBody::Revolute(chassis_body, TransformWorldToBody(chassis_body, pinion_center_at_rack, steering_shaft_dir, ZAxis), steeringShaftInfo, Transform(Vec3(0.0, 0.0, -steering_shaft_len / 2.0)));
Constraint::NoSlip1D(chassis_body, PosWorldToBody(chassis_body, pinion_virtual_contact_pos), UnitVec3(steering_rack_dir), steering_rack, steering_shaft);Better illustration below, the rack mount and pinion mount are attached to the same casing:
I think we can close this issue, as I misunderstood the concept of the mobilizers.
from simbody.
sherm1
commented on June 8, 2024
That's a nice solution -- better than using a Coupler constraint since it properly places the reaction force at the contact point. One thing to note is that it NoSlip1d is a non-holonomic (velocity) constraint so doesn't specify the relation between the rotational and translational position coordinates. That's not necessarily a problem, just means you should take care to initialize those coordinates as you want them at start of simulation.
BTW, you may want to consider adopting "monogram" notation as a way to keep all the frames straight. Simbody uses that in its documentation, but we have refined it and documented it better in Drake here.
from simbody.
Related Issues (20)
- Usage of SimTK::Vec for custom types. HOT 1
- Incoming PR - Improvement to ExponentialSpringForce HOT 4
- The OBJ file parser should ignore all kinds of whitespace for face (`f`) commands HOT 2
- TestBigMatrix fails on mips64el and ppc64el architectures HOT 8
- Problem when weighting integration accuracy
- TestCustomConstraints (Failed) on x86_64
- Setting output precision for String::String(const T& t) HOT 4
- "No such file or directory" HOT 6
- Visualizer crashes when drive letters don't match HOT 7
- Cannot compile in C++20 if a compilation unit uses `MultibodyGraphMaker.h`
- `getContiguousScalarData` has different behavior for `RowVector` and `RowVectorView` HOT 3
- Variable precision for String::String(const T& t) and Xml::setValueAs(const T& t) HOT 3
- Simbody Visualization not working on MacOS HOT 1
- Specifying XML output precision with an optional argument causes a bug for variables of type bool HOT 1
- TestXML fails on Windows 11, Visual Studio 2022 with a Release build. HOT 2
- Expose `SimbodyMatterSubsystemRep::multiplyByPVATranspose` to `SimbodyMatterSubsystem` HOT 2
- Visaulization HOT 1
- Simbody core aborted while using it with gazebo classic after loading a SDF. HOT 6
- Efficiently calculating a subset of a system's body and mobility forces HOT 2
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from simbody.