Compared with other control algorithms, MPC has the ability to predict future events and adjust the control strategy accordingly. Conventional proportional-integral-derivative (PID) controllers lack this predictive performance. Overall, the application of MPC to the control process provides a powerful and flexible way to improve performance and meet complex constraints. Objectives of this system are:
- Avoiding rear-end collision
- Reduce energy consumption
- Improves ride comfort
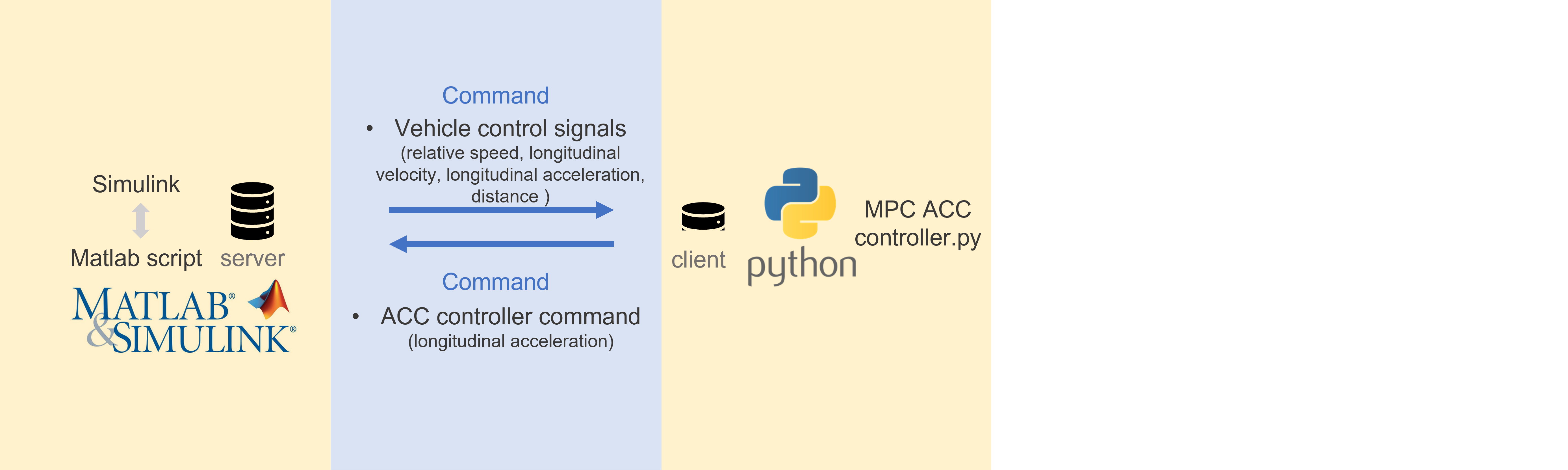
- MATLAB/Simulink: as vehicle simulator and server
- Python: as a client, the expected acceleration is calculated based on the received signal by employing a Model Predictive Control (MPC) algorithm.