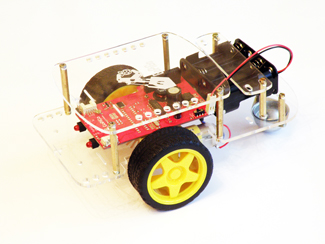
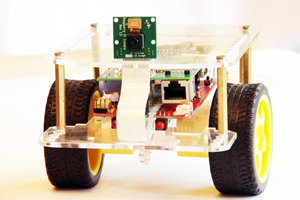
The GoPiGo is a delightful and complete robot for the Raspberry Pi that turns your Pi into a fully operating robot. GoPiGo is a mobile robotic platform for the Raspberry Pi developed by Dexter Industries.
The original firmware and API was Developed by Karan Nayan, Oct. 2013
This repository contains source code, firmware and design materials for the GoPiGo.
For installing the python package(s) of the GoPiGo, use the following command:
curl -kL dexterindustries.com/update_gopigo | bash
Or if you're still accustomed to the old ways, you can clone the repo, head over to the Setup folder and run the install script like this:
bash update_gopigo3.sh
These 2 methods of installing the robot are identical - the difference is that the former takes the script from an online source and in the latter case, you run it from the repository itself.
GoPiGo for the Raspberry Pi: an open source robotics platform for the Raspberry Pi. Copyright (C) 2017 Dexter Industries
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/gpl-3.0.txt.









































































































































































