Comments (8)
 jcarpent
commented on August 14, 2024
jcarpent
commented on August 14, 2024
What are you exact needs @eduardo98m? Which concrete applications do you foresee?
@eduardo98m We would be happy to help you to contribute to hpp-fcl by implementing this feature. Do you agree?
From what I have read in other forums a quick fix might be to create a very long and thin cylinder, or use a small sphere in continuous collision detection mode.
These solutions won't be efficient. You should rather look at faster solutions ;)
from hpp-fcl.
 eduardo98m
commented on August 14, 2024
eduardo98m
commented on August 14, 2024
Hello @jcarpent
I basically need to get the point of contact between a ray (defined with a start and an endpoint) and any other collider.
The application i want to get from theses is being able to simulate a Lidar sensor (or ultrasonic, infrared, etc. exterioceptive sensor)
Here is an rough sketch of the functionality:

Here is also my basic implementation using a capsule collider (I figured it would be faster than a cylinder):
(The code below is part of my physics engine project, thats why I perform the collision test with multiple objects).
std::vector<vec3> World::raycast(vec3 start, vec3 end)
{
// Create a capsule in hpp::fcl
scalar lenght = ti::magnitude(end - start);
scalar radius = 0.001; // if we take 1 m as the unit, this should be 1 [mm]
std::shared_ptr<hpp::fcl::Capsule> ray_collider = std::make_shared<hpp::fcl::Capsule>(radius, lenght);
vec3 position = 0.5*(start + end);
vec3 direction = ti::normalize(end - start);
vec3 up = {0.0, 1.0, 0.0};
// Create a quaternion representing the capsule orientation
quat orientation = ti::quat_from_axis_angle(direction, 0.0f);
// Rotate the quaternion by 90 degrees around the up vector to align the capsule with the raycast
orientation = orientation * ti::quat_from_axis_angle(up, M_PI / 2.0f);
// Now we need to get the orientation of the capsule from the two points
hpp::fcl::Transform3f transform = ti::get_eigen_transform(position,
orientation);
std::vector<vec3> points;
// Now we need to check the capsule collider with the rest of the bodies of the world
for (int i = 0; i < this->bodies.size(); i++)
{
hpp::fcl::CollisionResult col_res;
hpp::fcl::CollisionRequest col_req;
hpp::fcl::collide(ray_collider.get(),
transform,
this->bodies[i].collider_info.get(),
ti::get_eigen_transform(this->bodies[i].position,
this->bodies[i].orientation),
col_req,
col_res);
if (col_res.isCollision())
{
vec3 normal = {0.0, 0.0, 0.0};
vec3 contrac_point_1 = {0.0, 0.0, 0.0};
vec3 contrac_point_2 = {0.0, 0.0, 0.0};
hpp::fcl::Contact contact = col_res.getContact(0);
points.push_back(ti::from_eigen(contact.pos));
}
}
return points;
}I am not really sure how to implement the feature directly in hpp::fcl, but im guessing that creating a ray collider and figuring out its signed distance function might be the way to go.
from hpp-fcl.
jcarpent
commented on August 14, 2024
Thanks @eduardo98m for sharing your thoughts on the topic.
An efficient solution should rely on the support function, derived for each primitive and which is at the core of the GJK and EPA algorithms for checking the collision between convex objects.
from hpp-fcl.
 lmontaut
commented on August 14, 2024
lmontaut
commented on August 14, 2024
Hi @eduardo98m,
If you represent your rays by capsules with zero radius, hppfcl will treat your capsule as a segment. You can then call collide and things should work out of the box. Let us know if this solution works for you :)
from hpp-fcl.
eduardo98m
commented on August 14, 2024
I tried using the capsule with zero radius (and also tried the cylinder), and im getting some strange results. For some reason I only get one contact per collision, and the points I get while colliding with a sphere collider are not really the ones that are expected. I made a video so it could be better visualized:
https://youtu.be/EnQ7Yq9Gm5E
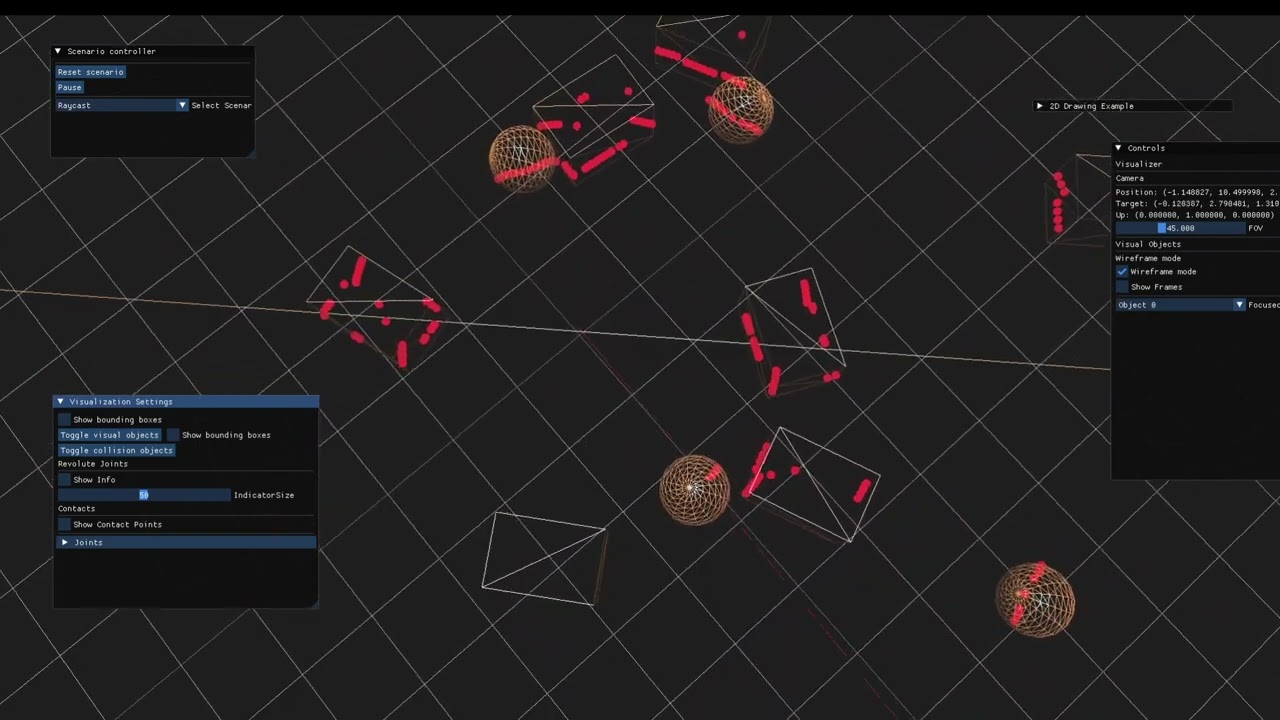

Here is the code of the raycast (Im not sure if there is a parameter in the collision request i should change to get better results):
std::vector<vec3> World::raycast(vec3 start, vec3 end)
{
// Create a capsule in hpp::fcl
scalar lenght = ti::magnitude(end - start);
scalar radius = 0; //
std::shared_ptr<hpp::fcl::Cylinder> ray_collider = std::make_shared<hpp::fcl::Cylinder>(radius, lenght);
vec3 position = 0.5 * (start + end);
vec3 direction = ti::normalize(end - start);
vec3 up = {0.0, 0.0, 1.0};
vec3 cross = ti::cross(up, direction);
vec3 axis = cross/ti::magnitude(cross);
scalar angle = ti::acos(ti::dot(direction, up));
quat orientation = ti::quat_from_axis_angle(axis, angle) ;
hpp::fcl::CollisionObject* ray = new hpp::fcl::CollisionObject(ray_collider);
ray->setTransform(ti::get_eigen_transform(position, orientation));
ray->computeAABB();
std::vector<vec3> points;
// Now we need to check the capsule collider with the rest of the bodies of the world
for (int i = 0; i < this->bodies.size(); i++)
{
hpp::fcl::CollisionObject* col_obj = new hpp::fcl::CollisionObject(this->bodies[i].collider_info);
col_obj->setTransform(
ti::get_eigen_transform(this->bodies[i].position,
this->bodies[i].orientation)
);
col_obj->computeAABB();
if (ray->getAABB().contain(col_obj->getAABB())){
hpp::fcl::CollisionResult col_res;
hpp::fcl::CollisionRequest col_req;
col_req.num_max_contacts = 16;
hpp::fcl::collide(ray,
col_obj,
col_req,
col_res);
if (col_res.isCollision())
{
// vec3 point;
// scalar min_dist = INFINITY;
// std::cerr << "N contacs : " << col_res.numContacts() << "\n";
// for (int i = 0; i< col_res.numContacts(); i++ ){
// vec3 candidate = ti::from_eigen(col_res.getContact(i).pos);
// // scalar dist = ti::magnitude(start - candidate);
// // if (dist < min_dist){
// // min_dist = dist;
// // point = candidate;
// // }
// points.push_back(candidate);
// }
points.push_back(ti::from_eigen(col_res.nearest_points[1]));
}
}
}
return points;
}from hpp-fcl.
lmontaut
commented on August 14, 2024
Hey @eduardo98m, thanks a lot for the video! That's really helpful. I read your issue too quickly and didn't realize you also needed the projection of the ray onto the object. I thought you only to know yes/no collision.
The contact points you are getting are coherent with collision detection in the sense that it corresponds to the middle point of the separating vector (i.e the vector that brings the two shapes in touching collision).
Anyway, it's indeed not the point you want in your application.
Let me think more about your problem and see if there is an easy way to solve it with hpp-fcl and get back to you!
from hpp-fcl.
lmontaut
commented on August 14, 2024
Hi @eduardo98m, one way to solve your problem might be to do two successive calls to collide and distance:
- First is a
collidecall between your geometry and the ray represented by a capsule with zero radius. This tells you whether or not the ray is colliding with the geometry. - If it is the case, then you can call
distancebetween the geometry and the origin of the ray. The origin of the ray can be represented as a sphere with zero radius. You will get 2 witness points, one should be the origin of the ray and the other one will be the orthogonal projection of the origin of the ray onto the geometry.
Let us know if this works for you!
from hpp-fcl.
eduardo98m
commented on August 14, 2024
Hello @lmontaut sorry for the late response, I tried what your suggestion but im not getting the desired result, because i don't get the points the capsule is passing trough the geometry (P2 in the figure), but the nearest point of the colliding shape to the origin of the ray (P1).
Maybe i am getting something wrong, or there is an operation that im missing, but so far thats what I have been able to get.

from hpp-fcl.
Related Issues (20)
- How should I cite this repo? HOT 1
- RuntimeError: Library built without qhull. Cannot build object of this type. HOT 5
- Does this new fcl lib support taking convex object as the leaf node for building BVH model? HOT 4
- Can you share examples and tutorials for calling hpp-fcl in python, especially for robotic arm urdf or .stl? HOT 1
- Segmentation Fault when using with Pinocchio HOT 2
- How to compile in Windows? HOT 2
- Python 3.8 with pip CI step fail HOT 1
- Point inside given shape HOT 1
- Is there any tutorial or demo ?? HOT 2
- Can't register Plane or Halfplane to DynamicAABBTreeCollisionManager HOT 4
- Broadphase optimization with Planes/Halfspaces
- Fix cmake export to allow cross-compilation with sysroot HOT 3
- make error: Eigen 'Vector' template error HOT 2
- TODO: avoid BVH-BVH copy in `collide`?
- TODO: Add `TriangleP` to the distance function matrix
- TODO: rename `nearest_points` to `witness_points` in collision data
- Should we `clear` inside `collide`? HOT 4
- Question About Specific Narrowphase Collision Algorithm HOT 2
- Can broadphase collision detect parallel in different transform scenario? HOT 3
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from hpp-fcl.