Comments (14)
 luigifreda
commented on August 15, 2024
1
luigifreda
commented on August 15, 2024
1
did you check this https://github.com/luigifreda/pyslam/blob/master/slam.py#L705 ?
from pyslam.
 hbonnavaud
commented on August 15, 2024
1
hbonnavaud
commented on August 15, 2024
1
Wow it was the issue ... it was so simple after all thx a lot for your time. Sorry to bothered you.
from pyslam.
luigifreda
commented on August 15, 2024
Hi,
Thanks for the feedback.
Yes, you can access the current (at present time) estimates in that way (commented code
https://github.com/luigifreda/pyslam/blob/master/slam.py#L705 )
The poses are stored in the map frames and keyframes, which are continuously updated by BA.
If you access a frame/keyframe pose at a certain time during the processing, you'll get the estimate at that specific time (current estimate). Note that BA can reprocess the local map (including the keyframes and points around the frame/keyframe you considered) at any time later and readjust those estimates.
It depends on what you want to access and possibly evaluate: current (i.e. online) estimates or final estimates at the end of the trajectory.
Hope this helps.
Cheers,
Luigi
from pyslam.
hbonnavaud
commented on August 15, 2024
Hi,
I'm trying to get the estimate position without success.
I tried to plot map_state.spanning_tree[:, :3] but I don't get the same result that is plot in pangolin.
I also plot slam.tracking.predicted_pose.t but it don't shown anything similar to the trajectory ploted in pangolin.
I took a look to the commented code at https://github.com/luigifreda/pyslam/blob/master/slam.py#L700 , but I don't understood how it could help.
Can you help me? What did I missed?
from pyslam.
luigifreda
commented on August 15, 2024
Can you share your code?
from pyslam.
hbonnavaud
commented on August 15, 2024
Basically I put this block of code in the main_slam.py loop, and tryed to prind a bunch of variables, following what Viewer3D.py do.
if slam.map.num_frames() > 0:
# Build map state
##############################################################
# The block of code bellow is a copy of Viewer3D.py viewer_refresh().
map = slam.map
map_state = Viewer3DMapElement()
if map.num_frames() > 0:
map_state.cur_pose = map.get_frame(-1).Twc.copy()
if slam.tracking.predicted_pose is not None:
map_state.predicted_pose = slam.tracking.predicted_pose.inverse().matrix().copy()
if slam.tracking.kf_ref is not None:
reference_pose = slam.tracking.kf_ref.Twc.copy()
num_map_keyframes = map.num_keyframes()
keyframes = map.get_keyframes()
if num_map_keyframes > 0:
for kf in keyframes:
map_state.poses.append(kf.Twc)
map_state.poses = np.array(map_state.poses)
num_map_points = map.num_points()
if num_map_points > 0:
for i, p in enumerate(map.get_points()):
map_state.points.append(p.pt)
map_state.colors.append(np.flip(p.color))
map_state.points = np.array(map_state.points)
map_state.colors = np.array(map_state.colors) / 256.
for kf in keyframes:
for kf_cov in kf.get_covisible_by_weight(kMinWeightForDrawingCovisibilityEdge):
if kf_cov.kid > kf.kid:
map_state.covisibility_graph.append([*kf.Ow, *kf_cov.Ow])
if kf.parent is not None:
map_state.spanning_tree.append([*kf.Ow, *kf.parent.Ow])
for kf_loop in kf.get_loop_edges():
if kf_loop.kid > kf.kid:
map_state.loops.append([*kf.Ow, *kf_loop.Ow])
####################################################
if map_state.spanning_tree:
estimated_positions = map_state.spanning_tree
estimated_positions = np.array(estimated_positions)
plt.scatter(estimated_positions[:, 0], estimated_positions[:, 1], c="g")
plt.pause(0.00001)
The thing I found wired is that the plotted values do not match the spanning tree shown in pangolin window (visible when you disable show cameras and covisibility checkboxes)
from pyslam.
luigifreda
commented on August 15, 2024
https://matplotlib.org/stable/api/_as_gen/matplotlib.pyplot.scatter.html
matplotlib.pyplot.scatter is for drawing 2D points and it only considers the x and the y components (as you are doing in the code).
The spanning tree you are trying to draw in 2D is an array of 3D points. Why do you want to draw the projection of the 3D camera positions on the xy plane?
from pyslam.
hbonnavaud
commented on August 15, 2024
Because I don't care about the Z axis. Basically I want to plot the x y estimated position of the car. (I think it makes sens). I'm looking into the link to slam.py you shared above
from pyslam.
luigifreda
commented on August 15, 2024
You are assuming the Z axis is vertical. That's not correct.
This is the standard convention in computer vision when setting the camera frame
https://docs.opencv.org/4.x/pinhole_camera_model.png
https://docs.opencv.org/4.x/d9/d0c/group__calib3d.html
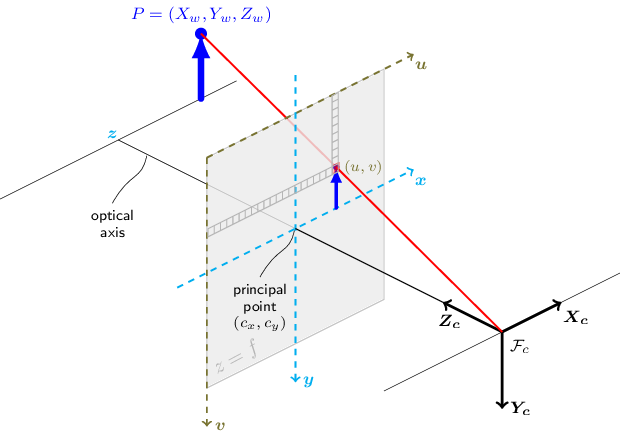{kind=link}
Keep in mind that, in visual SLAM, the pose is always estimated w.r.t. the first camera frame, which does not necessarily have any axis aligned with the gravity acceleration direction.
from pyslam.
hbonnavaud
commented on August 15, 2024
Yes but still, scatter X and Z, X and Y, or Y and Z don't give me nothing similar to the trajectory plotted in pangolin.
from pyslam.
hbonnavaud
commented on August 15, 2024
I think there is an error in https://github.com/luigifreda/pyslam/blob/master/slam.py#L705
def update_history(self):
f_cur = self.map.get_frame(-1)
self.cur_R = f_cur.pose[:3,:3].T
self.cur_t = np.dot(-self.cur_R,f_cur.pose[:3, 3])
if (self.init_history is True) and (self.trueX is not None):
self.t0_est = np.array([self.cur_t[0], self.cur_t[1], self.cur_t[2]]) # starting translation
self.t0_gt = np.array([self.trueX, self.trueY, self.trueZ]) # starting translation
if (self.t0_est is not None) and (self.t0_gt is not None):
p = [self.cur_t[0]-self.t0_est[0], self.cur_t[1]-self.t0_est[1], self.cur_t[2]-self.t0_est[2]] # the estimated traj starts at 0
self.traj3d_est.append(p)
self.traj3d_gt.append([self.trueX-self.t0_gt[0], self.trueY-self.t0_gt[1], self.trueZ-self.t0_gt[2]])
self.poses.append(poseRt(self.cur_R, p))
self.init_history is always True (according to my ctrl+f, maybe I missed a file), so self.cur_t[0]-self.t0_est[0] is always equal to 0. right? What am I missing here?
from pyslam.
hbonnavaud
commented on August 15, 2024
Well, the update history function give me the same that what I had before. The estimated position projected on the XZ plan is the red curve here.

from pyslam.
luigifreda
commented on August 15, 2024
I think you may want to consider the different scales on the two 2D axes of your 2D scatter plot.
https://matplotlib.org/stable/gallery/subplots_axes_and_figures/axis_equal_demo.html
from pyslam.
 pse0311
commented on August 15, 2024
pse0311
commented on August 15, 2024
Hello,
I am finding your creation very useful, thanks to you.
I'm interested in obtaining the x, y, z coordinate values stored in the Map Viewer. Could you please guide me on how to do this?
Thank you.
from pyslam.
Related Issues (20)
- main_slam.py 3D map view missing HOT 2
- pangoling error HOT 1
- Timeseries of camera pose HOT 2
- Program not ending when the video is completed and no more images.
- Aborted (core dumped) HOT 2
- Solving ImportError: ../pyslam/thirdparty/g2opy/lib/g2o.so: undefined symbol: _Py_ZeroStruct | Again... HOT 5
- Scale problem HOT 1
- change the optimization cost HOT 1
- RGBD extension - guidance
- Loop closure and pose graph optimization HOT 1
- How to add custom feature detection algorithms and feature descriptor sub algorithms? HOT 2
- Best brutal force SLAM configuration HOT 1
- Error with tensorflow-gpu HOT 2
- ORB_SLAM3 HOT 3
- feature_detector file HOT 2
- webcam error HOT 3
- MatplotLib Not responding HOT 5
- Getting error when running the slam HOT 1
- Failed Building wheel for opencv-contrib-python HOT 1
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from pyslam.