Bayesian Spatial Kernel Smoothing for Scalable Dense Semantic Mapping
catkin_ws/src$ git clone https://github.com/ganlumomo/BKISemanticMapping
catkin_ws/src$ cd ..
catkin_ws$ catkin_make
catkin_ws$ source ~/catkin_ws/devel/setup.bashcatkin_ws$ source /opt/intel/compilers_and_libraries/linux/bin/compilervars.sh intel64
catkin_ws$ catkin_make -DCMAKE_C_COMPILER=icc -DCMAKE_CXX_COMPILER=icpc
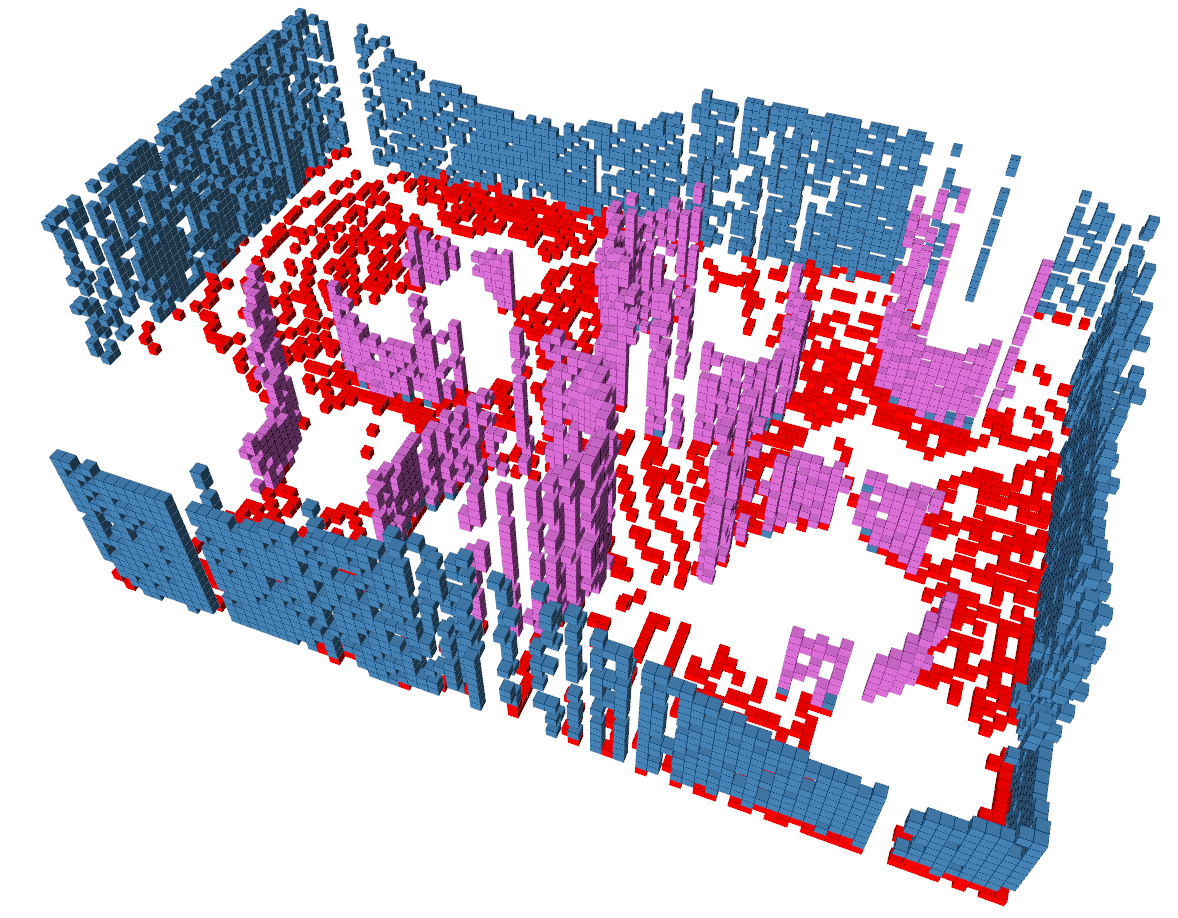
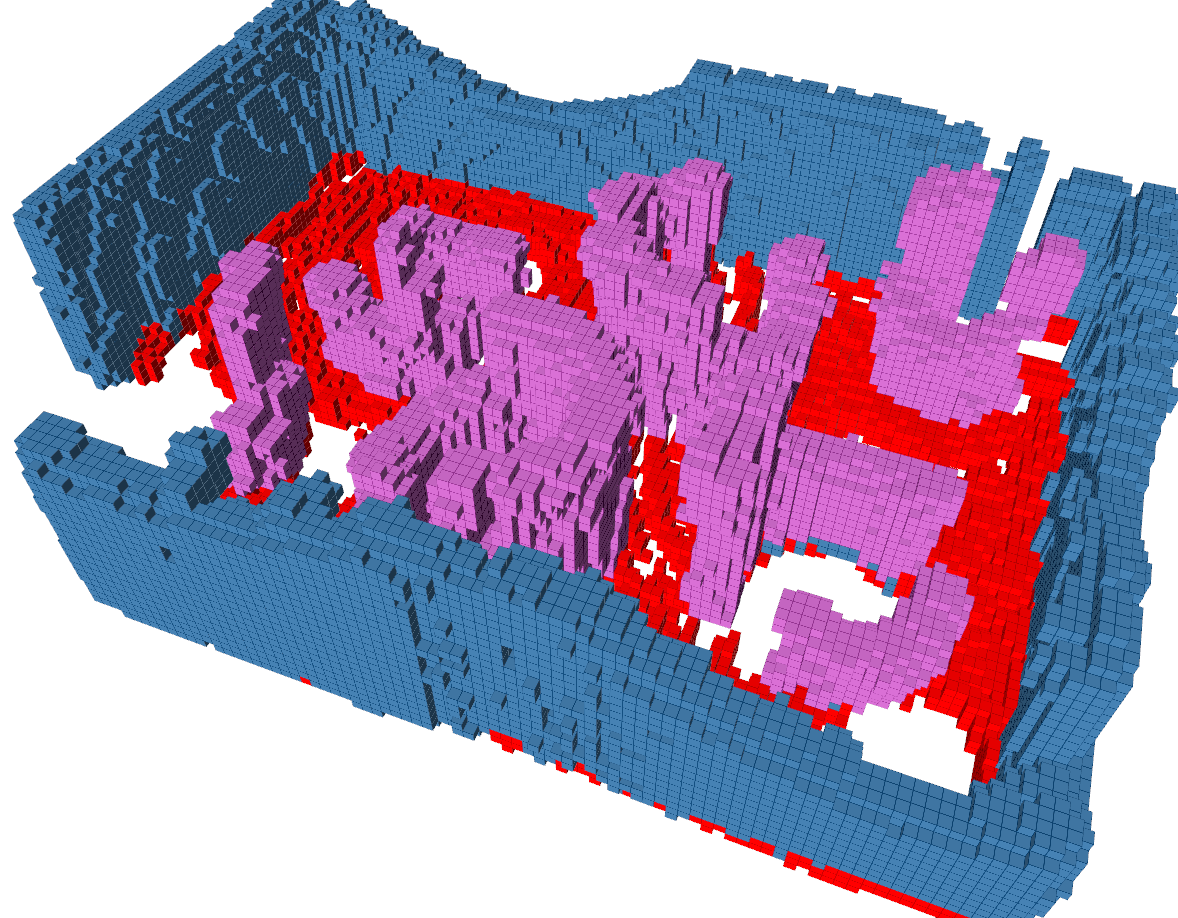
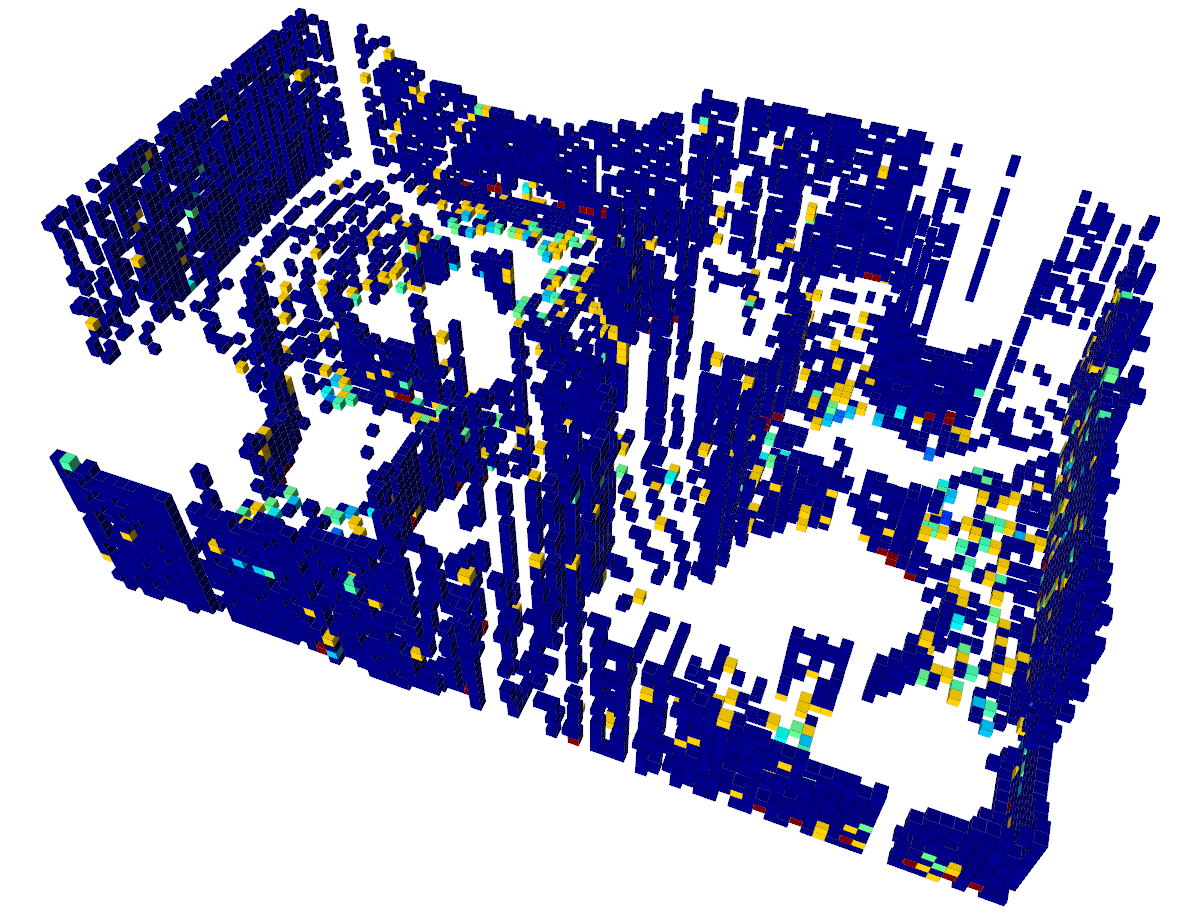
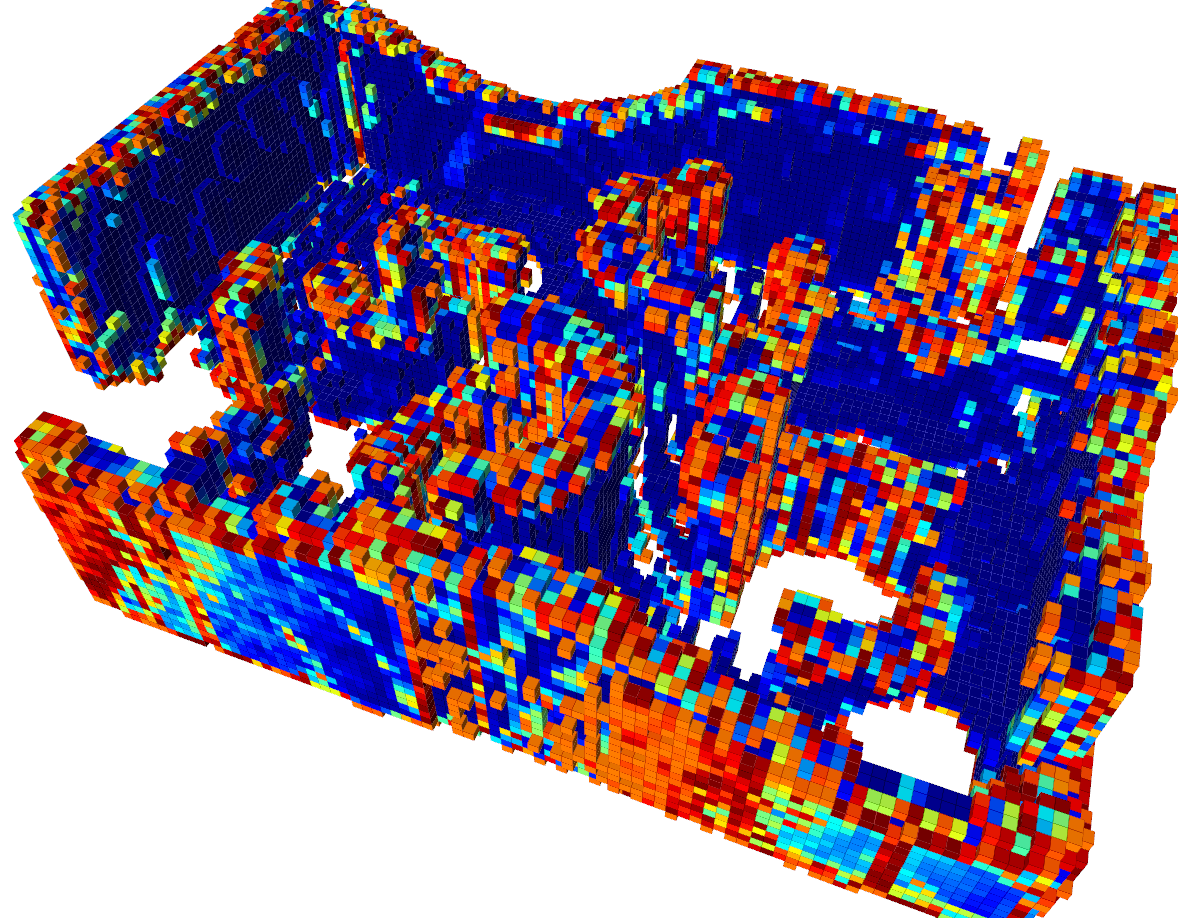
catkin_ws$ source ~/catkin_ws/devel/setup.bash$ roslaunch semantic_bki toy_example_node.launch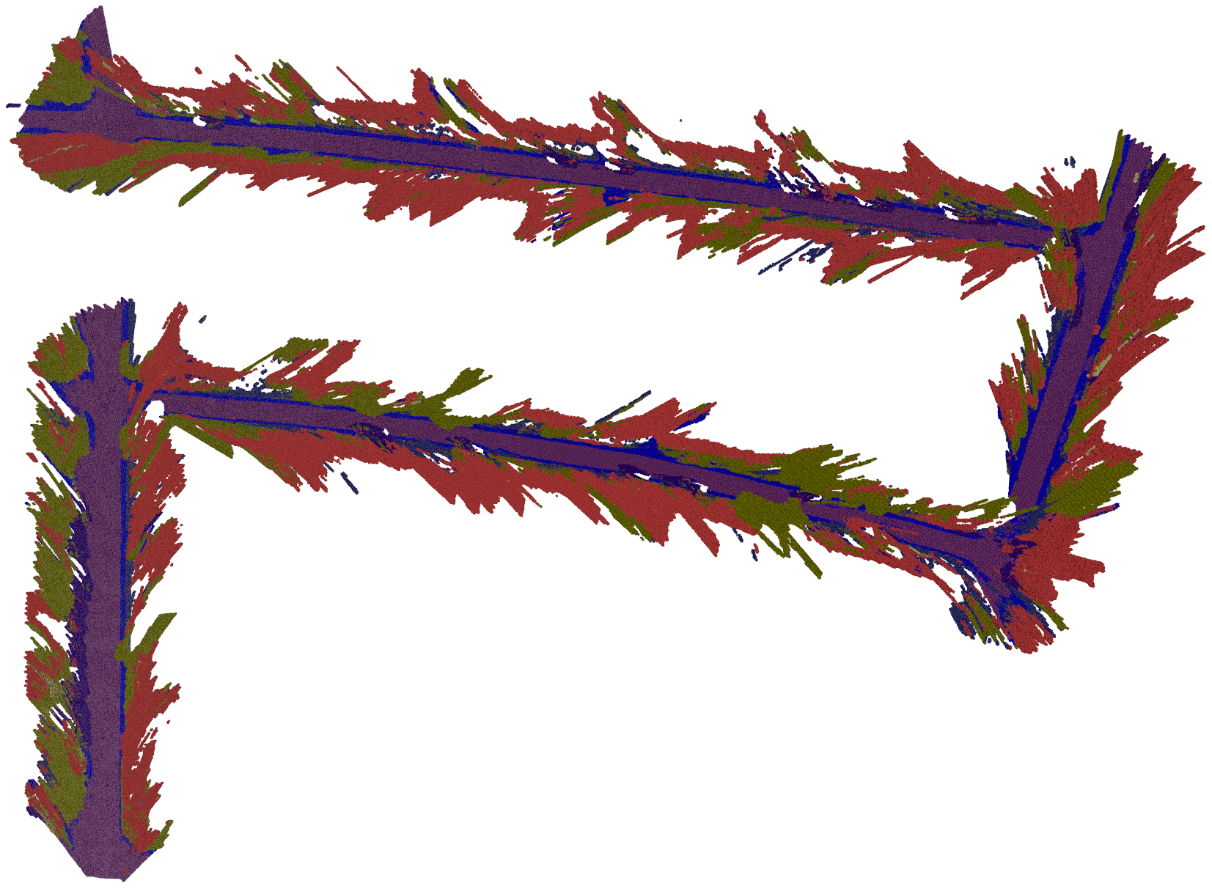
Please download data_kitti_15 and uncompress it into the data folder.
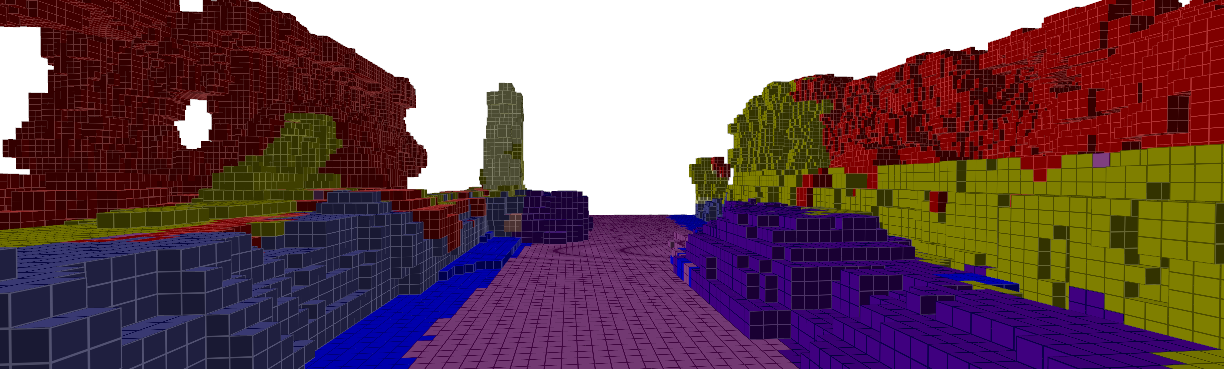
$ roslaunch semantic_bki kitti_node.launchYou will see semantic map in RViz. It also projects 3D grid onto 2D image for evaluation, stored at data/data_kitti_05/reproj_img.
Evaluation code is provided in kitti_evaluation.ipynb. You may modify the directory names to run it.
Please download semantickitti_04 and uncompress it into the data folder.
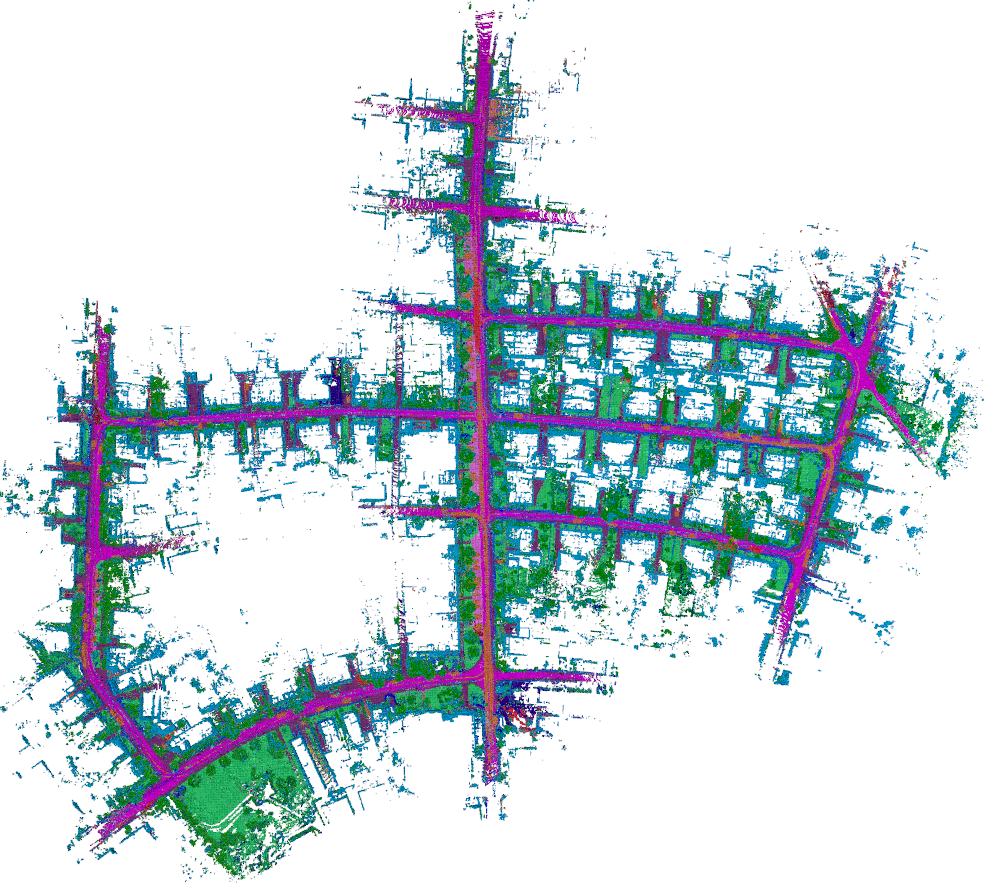
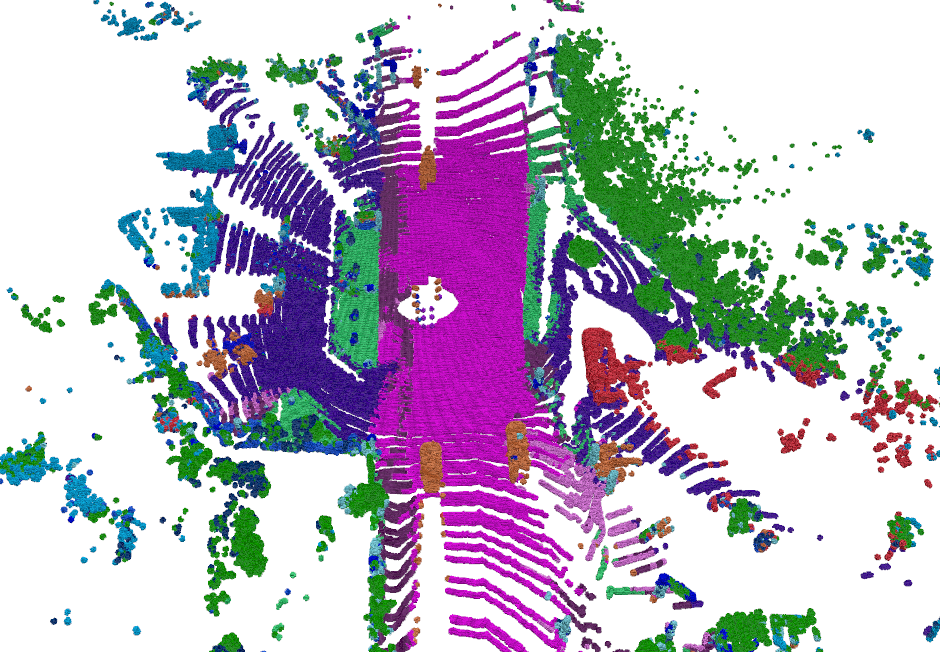
$ roslaunch semantic_bki semantickitti_node.launchYou will see semantic map in RViz. It also query each ground truth point for evaluation, stored at data/semantickitti_04/evaluations.
Evaluation code is provided in semantickitti_evaluation.ipynb. You may modify the directory names to run it, or follow the guideline in semantic-kitti-api for evaluation.
If you found this code useful, please cite the following:
Bayesian Spatial Kernel Smoothing for Scalable Dense Semantic Mapping (PDF)
@article{gan2019bayesian,
title={Bayesian Spatial Kernel Smoothing for Scalable Dense Semantic Mapping},
author={Gan, Lu and Zhang, Ray and Grizzle, Jessy W and Eustice, Ryan M and Ghaffari, Maani},
journal={arXiv preprint arXiv:1909.04631},
year={2019}
}
Learning-Aided 3-D Occupancy Mapping with Bayesian Generalized Kernel Inference (PDF)
@article{Doherty2019,
doi = {10.1109/tro.2019.2912487},
url = {https://doi.org/10.1109/tro.2019.2912487},
year = {2019},
publisher = {Institute of Electrical and Electronics Engineers ({IEEE})},
pages = {1--14},
author = {Kevin Doherty and Tixiao Shan and Jinkun Wang and Brendan Englot},
title = {Learning-Aided 3-D Occupancy Mapping With Bayesian Generalized Kernel Inference},
journal = {{IEEE} Transactions on Robotics}
}

