This repository contains a PyTorch re-implementation of the paper: Delicate Textured Mesh Recovery from NeRF via Adaptive Surface Refinement.
Project Page | Arxiv | Paper | Models
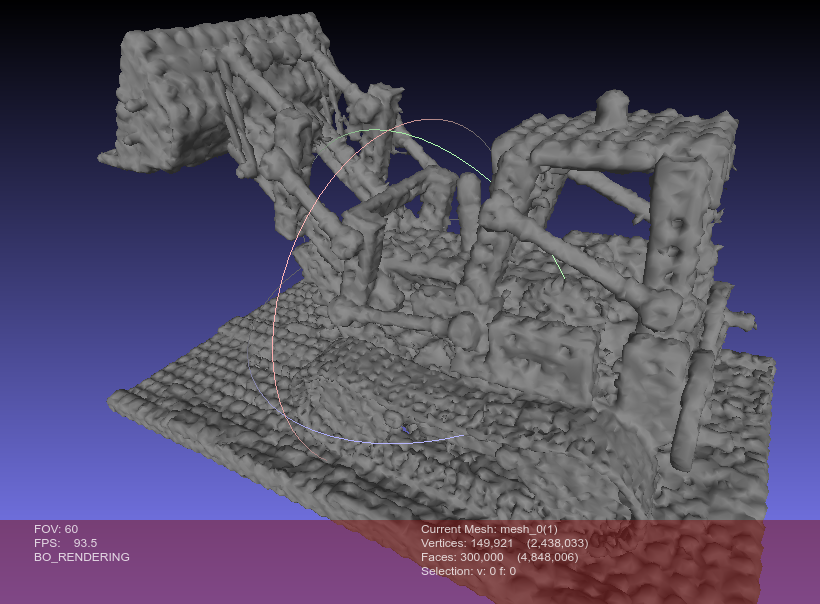
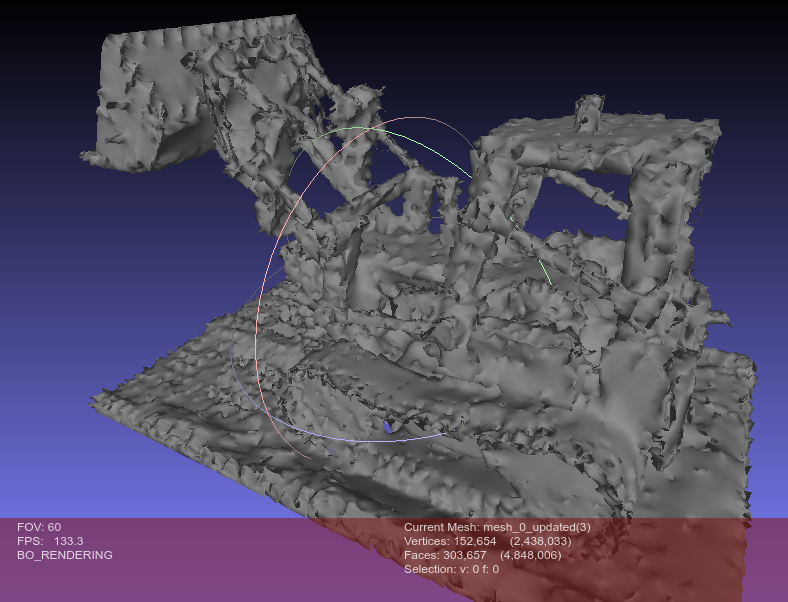
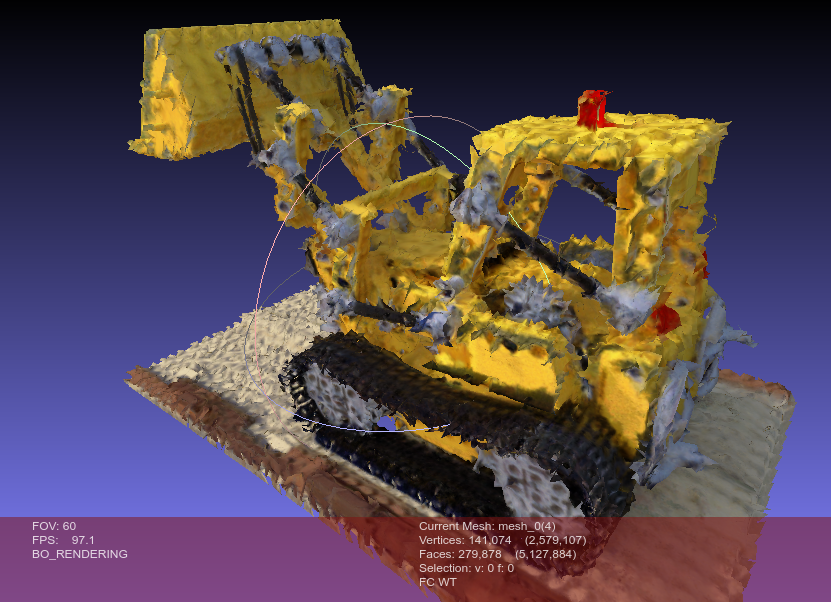
News (2023.5.3): support background removal and SDF mode for stage 0, which produces more robust and smooth mesh for single-object reconstruction:


git clone https://github.com/ashawkey/nerf2mesh.git
cd nerf2meshpip install -r requirements.txt
# tiny-cuda-nn
pip install git+https://github.com/NVlabs/tiny-cuda-nn/#subdirectory=bindings/torch
# nvdiffrast
pip install git+https://github.com/NVlabs/nvdiffrast/
# pytorch3d
pip install git+https://github.com/facebookresearch/pytorch3d.gitBy default, we use load to build the extension at runtime.
However, this may be inconvenient sometimes.
Therefore, we also provide the setup.py to build each extension:
# install all extension modules
bash scripts/install_ext.sh
# if you want to install manually, here is an example:
cd raymarching
python setup.py build_ext --inplace # build ext only, do not install (only can be used in the parent directory)
pip install . # install to python path (you still need the raymarching/ folder, since this only install the built extension.)- Ubuntu 22 with torch 1.12 & CUDA 11.6 on a V100.
We support the original NeRF data format like nerf-synthetic, and COLMAP dataset like Mip-NeRF 360.
Please download and put them under ./data.
First time running will take some time to compile the CUDA extensions.
### Stage0 (NeRF, continuous, volumetric rendering), this stage exports a coarse mesh under <workspace>/mesh_stage0/
# nerf
python main.py data/nerf_synthetic/lego/ --workspace trial_syn_lego/ -O --bound 1 --scale 0.8 --dt_gamma 0 --stage 0 --lambda_tv 1e-8
# colmap
python main.py data/garden/ --workspace trial_360_garden -O --data_format colmap --bound 16 --enable_cam_center --enable_cam_near_far --scale 0.3 --downscale 4 --stage 0 --lambda_entropy 1e-3 --clean_min_f 16 --clean_min_d 10 --lambda_tv 2e-8 --visibility_mask_dilation 50
### Stage1 (Mesh, binarized, rasterization), this stage exports a fine mesh with textures under <workspace>/mesh_stage1/
# nerf
python main.py data/nerf_synthetic/lego/ --workspace trial_syn_lego/ -O --bound 1 --scale 0.8 --dt_gamma 0 --stage 1
# colmap
python main.py data/garden/ --workspace trial_360_garden -O --data_format colmap --bound 16 --enable_cam_center --enable_cam_near_far --scale 0.3 --downscale 4 --stage 1 --iters 10000
### Web Renderer
# you can simply open <workspace>/mesh_stage1/mesh.obj with a 3D viewer to visualize the diffuse texture.
# to render full diffuse + specular, you'll need to host this folder (e.g., by vscode live server), and open renderer.html for further instructions.Tips:
- To get best mesh quality, you may need to adjust
--scaleto let the most interested object fall inside the unit box[-1, 1]^3, which can be visualized by appending--vis_pose. - To better model background (especially for outdoor scenes), you may need to adjust
--boundto let most sparse points fall into the full box[-bound, bound]^3, which can also be visualized by appending--vis_pose. - For single object centered captures focusing on mesh assets quality:
- remove the background by
scripts/remove_bg.pyand only reconstruct the targeted object. - use
--sdfto enable sdf based stage 0 model. - use
--diffuse_onlyif you only want to get the diffuse texture. - adjust
--decimate_target 1e5to control stage 0 number of mesh faces, and adjust--refine_remesh_size 0.01to control stage 1 number of mesh faces (average edge length). - adjust
--lambda_normal 1e-2for more smooth surface.
- remove the background by
- For forward-facing captures:
- remove
--enable_cam_centerso the scene center is determined by sparse points instead of camera positions.
- remove
# prepare your video or images under /data/custom, and run colmap (assumed installed):
python scripts/colmap2nerf.py --video ./data/custom/video.mp4 --run_colmap # if use video
python scripts/colmap2nerf.py --images ./data/custom/images/ --run_colmap # if use images
# generate downscaled images if resolution is very high and OOM (asve to`data/<name>/images_{downscale}`)
python scripts/downscale.py data/<name> --downscale 4
# NOTE: remember to append `--downscale 4` as well when running main.py
# perform background removal for single object 360 captures (save to 'data/<name>/mask')
python scripts/remove_bg.py data/<name>/images
# NOTE: the mask quality depends on background complexity, do check the mask!
# recommended options for single object 360 captures
python main.py data/custom/ --workspace trial_custom -O --data_format colmap --bound 1 --dt_gamma 0 --stage 0 --clean_min_f 16 --clean_min_d 10 --visibility_mask_dilation 50 --iters 10000 --decimate_target 1e5 --sdf
# NOTE: for finer faces, try --decimate_target 3e5
python main.py data/custom/ --workspace trial_custom -O --data_format colmap --bound 1 --dt_gamma 0 --stage 1 --iters 5000 --lambda_normal 1e-2 --refine_remesh_size 0.01 --sdf
# NOTE: for finer faces, try --lambda_normal 1e-1 --refine_remesh_size 0.005
# recommended options for outdoor 360-inwarding captures
python main.py data/custom/ --workspace trial_custom -O --data_format colmap --bound 16 --enable_cam_center --enable_cam_near_far --stage 0 --lambda_entropy 1e-3 --clean_min_f 16 --clean_min_d 10 --lambda_tv 2e-8 --visibility_mask_dilation 50
python main.py data/custom/ --workspace trial_custom -O --data_format colmap --bound 16 --enable_cam_center --enable_cam_near_far --stage 1 --iters 10000 --lambda_normal 1e-3
# recommended options for forward-facing captures
python main.py data/custom/ --workspace trial_custom -O --data_format colmap --bound 2 --scale 0.1 --stage 0 --clean_min_f 16 --clean_min_d 10 --lambda_tv 2e-8 --visibility_mask_dilation 50
python main.py data/custom/ --workspace trial_custom -O --data_format colmap --bound 2 --scale 0.1 --stage 1 --iters 10000 --lambda_normal 1e-3### -O: the recommended setting, equals
--fp16 --preload --mark_untrained --random_image_batch --adaptive_num_rays --refine --mesh_visibility_culling
### load checkpoint
--ckpt latest # by default we load the latest checkpoint in the workspace
--ckpt scratch # train from scratch. For stage 1, this will still load the stage 0 model as an initialization.
--ckpt trial/checkpoints/xxx.pth # specify it by path
### testing
--test # test, save video and mesh
--test_no_video # do not save video
--test_no_mesh # do not save mesh
### dataset related
--data_format [colmap|nerf|dtu] # dataset format
--enable_cam_center # use camera center instead of sparse point center as scene center (colmap dataset only)
--enable_cam_near_far # estimate camera near & far from sparse points (colmap dataset only)
--bound 16 # scene bound set to [-16, 16]^3, note that only meshes inside the center [-1, 1]^3 will be adaptively refined!
--scale 0.3 # camera scale, if not specified, automatically estimate one based on camera positions. Important targets should be scaled into the center [-1, 1]^3.
### visualization
--vis_pose # viusalize camera poses and sparse points (sparse points are colmap dataset only)
--gui # open gui (only for testing, training in gui is not well supported!)
### balance between surface quality / rendering quality
# increase these weights to get better surface quality but worse rendering quality
--lambda_tv 1e-7 # total variation loss (stage 0)
--lambda_entropy 1e-3 # entropy on rendering weights (transparency, alpha), encourage them to be either 0 or 1 (stage 0)
--lambda_lap 0.001 # laplacian smoothness loss (stage 1)
--lambda_normal 0.001 # normal consistency loss (stage 1)
--lambda_offsets 0.1 # vertex offsets L2 loss (stage 1)
--lambda_edgelen 0.1 # edge length L2 loss (stage 1)
# set all smoothness regularizations to 0, usually get the best rendering quality
--wo_smooth
# only use diffuse shading
--diffuse_only
### coarse mesh extraction & post-processing
--mcubes_reso 512 # marching cubes resolution
--decimate_target 300000 # decimate raw mesh to this face number
--clean_min_d 5 # isolated floaters with smaller diameter will be removed
--clean_min_f 8 # isolated floaters with fewer faces will be removed
--visibility_mask_dilation 5 # dilate iterations after performing visibility face culling
### fine mesh exportation
--texture_size 4096 # max texture image resolution
--ssaa 2 # super-sampling anti-alias ratio
--refine_size 0.01 # finest edge len at subdivision
--refine_decimate_ratio 0.1 # decimate ratio at each refine step
--refine_remesh_size 0.02 # remesh edge len after decimation
### Depth supervision (colmap dataset only)
# download depth checkpoints (omnidata v2)
cd depth_tools
bash download_models.sh
cd ..
# generate dense depth (save to `data/<name>/depths`)
python depth_tools/extract_depth.py data/<name>/images_4
# enable dense depth training
python main.py data/<name> -O --bound 16 --data_format colmap --enable_dense_depthPlease check the scripts directory for more examples on common datasets, and check main.py for all options.
@article{tang2022nerf2mesh,
title={Delicate Textured Mesh Recovery from NeRF via Adaptive Surface Refinement},
author={Tang, Jiaxiang and Zhou, Hang and Chen, Xiaokang and Hu, Tianshu and Ding, Errui and Wang, Jingdong and Zeng, Gang},
journal={arXiv preprint arXiv:2303.02091},
year={2022}
}