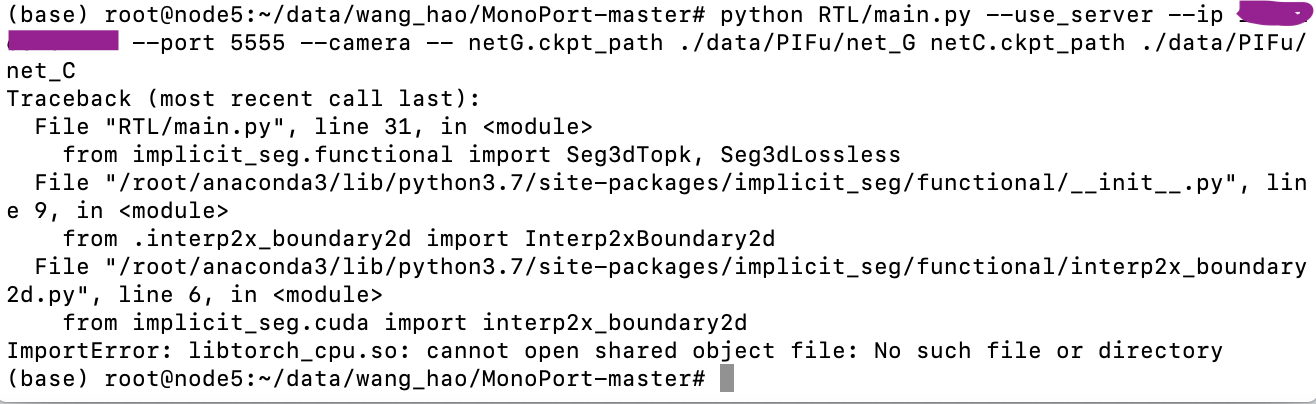
root@6d952ea9a8d1:/monoport# python RTL/main.py --use_server --ip 192.168.0.103 --port 5555 --image_folder images -- netG.ckpt_path ./data/PIFu/net_G netC.ckpt_path ./data/PIFu/net_C
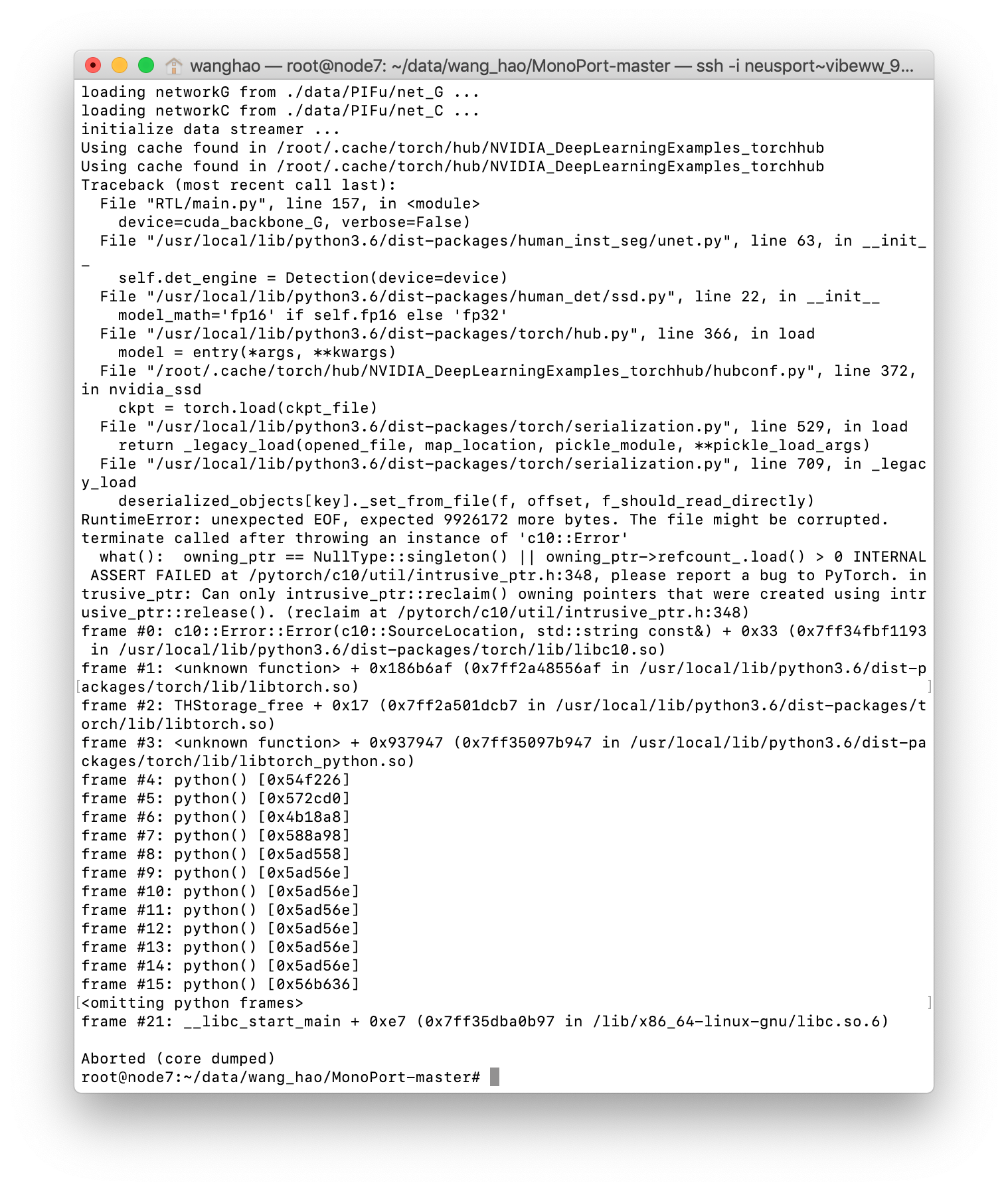
loading networkG from ./data/PIFu/net_G ...
loading networkC from ./data/PIFu/net_C ...
initialize data streamer ...
Using cache found in /root/.cache/torch/hub/NVIDIA_DeepLearningExamples_torchhub
/root/.cache/torch/hub/NVIDIA_DeepLearningExamples_torchhub/PyTorch/Classification/ConvNets/image_classification/models/efficientnet.py:18: UserWarning: pytorch_quantization module not found, quantization will not be available
"pytorch_quantization module not found, quantization will not be available"
Using cache found in /root/.cache/torch/hub/NVIDIA_DeepLearningExamples_torchhub
Traceback (most recent call last):
File "RTL/main.py", line 157, in <module>
device=cuda_backbone_G, verbose=False)
File "/monoport/human_inst_seg/human_inst_seg/unet.py", line 64, in __init__
self.det_engine = Detection(device=device)
File "/monoport/human_det/human_det/ssd.py", line 23, in __init__
weights='IMAGENET1K_V1'
File "/usr/local/lib/python3.7/site-packages/torch/hub.py", line 339, in load
model = _load_local(repo_or_dir, model, *args, **kwargs)
File "/usr/local/lib/python3.7/site-packages/torch/hub.py", line 368, in _load_local
model = entry(*args, **kwargs)
File "/root/.cache/torch/hub/NVIDIA_DeepLearningExamples_torchhub/PyTorch/Detection/SSD/ssd/entrypoints.py", line 179, in nvidia_ssd
from . import model as ssd
File "/root/.cache/torch/hub/NVIDIA_DeepLearningExamples_torchhub/PyTorch/Detection/SSD/ssd/model.py", line 55, in <module>
class SSD300(nn.Module):
File "/root/.cache/torch/hub/NVIDIA_DeepLearningExamples_torchhub/PyTorch/Detection/SSD/ssd/model.py", line 56, in SSD300
def __init__(self, backbone=ResNet('resnet50')):
File "/root/.cache/torch/hub/NVIDIA_DeepLearningExamples_torchhub/PyTorch/Detection/SSD/ssd/model.py", line 30, in __init__
backbone = resnet50(weights=None if backbone_path else weights)
File "/usr/local/lib/python3.7/site-packages/torchvision/models/resnet.py", line 301, in resnet50
**kwargs)
File "/usr/local/lib/python3.7/site-packages/torchvision/models/resnet.py", line 260, in _resnet
model = ResNet(block, layers, **kwargs)
TypeError: __init__() got an unexpected keyword argument 'weights'