| Paper Citation |  |
|
Status |
| master | |
| development |
Pure Numpy Implementation of the Coherent Point Drift Algorithm.
MIT License.
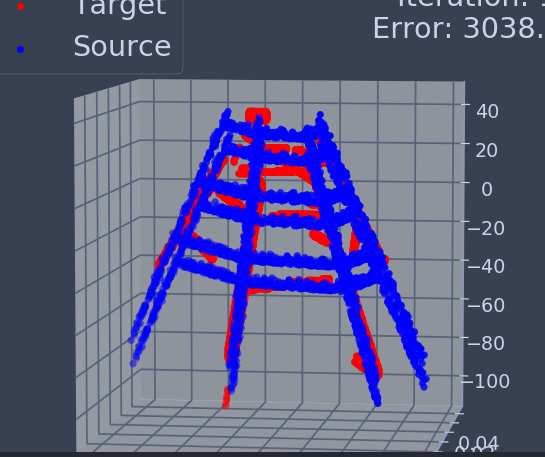
This is a pure numpy implementation of the coherent point drift CPD algorithm by Myronenko and Song for use by the python community. It provides three registration methods for point clouds: 1) Scale and rigid registration; 2) Affine registration; and 3) Gaussian regularized non-rigid registration.
The CPD algorithm is a registration method for aligning two point clouds. In this method, the moving point cloud is modelled as a Gaussian Mixture Model (GMM) and the fixed point cloud are treated as observations from the GMM. The optimal transformation parameters maximze the Maximum A Posteriori (MAP) estimation that the observed point cloud is drawn from the GMM.
The registration methods work for arbitrary MxN 2D arrays where M is the number of "points" and N is the number of dimensions. A typical point cloud would be Mx2 or Mx3 for 2D and 3D points clouds respectively. For more information, please refer to my blog.
pip install pycpdClone the repository to a location, referred to as the root folder. For example:
git clone https://github.com/siavashk/pycpd.git $HOME/pycpdInstall the package:
pip install .or
make requirements
make buildFor running sample registration examples under /examples, you will need Matplotlib to visualize the registration. This can be downloaded by running:
pip install matplotlibor
make visualizeEach registration method is contained within a single class inside the pycpd subfolder. To try out the registration, you can simply run:
python examples/fish{Transform}_{Dimension}.py
where Transform is either rigid, affine or deformable and Dimension is either 2D or 3D. Note that examples are meant to be run from the root folder.
Basic usage includes providing any of the registration methods with 2 arrays that are MxN & BxN. E.g., they can have different numbers of points (M & B) but must have the same number of dimensions per point (N).
from pycpd import RigidRegistration
import numpy as np
# create 2D target points (you can get these from any source you desire)
# creating a square w/ 2 additional points.
target = np.array([[0, 0], [0, 1], [1, 0], [1, 1], [0.5, 0], [0, 0.5]])
print('Target Points: \n', target)
# create a translation to apply to the target for testing the registration
translation = [1, 0]
# create a fake source by adding a translation to the target.
# in a real use, you would load the source points from a file or other source.
# the only requirement is that this array also be 2-dimensional and that the
# second dimension be the same length as the second dimension of the target array.
source = target + translation
print('Source Points: \n', source)
# create a RigidRegistration object
reg = RigidRegistration(X=target, Y=source)
# run the registration & collect the results
TY, (s_reg, R_reg, t_reg) = reg.register()
# TY is the transformed source points
# the values in () are the registration parameters.
# In this case of rigid registration they are:
# s_reg the scale of the registration
# R_reg the rotation matrix of the registration
# t_reg the translation of the registrationThe affine and deformable registration methods are used in the same way, but provide their respective transformation parameters.
Sometimes you may want to apply the transformation parameters to another point cloud. For example, if you have a very large point cloud it is sometimes appropriate to randomly sample some of the points for registration and then apply the transformation to the entire point cloud.
To do this, after fitting the above registration, you would run reg.transform_point_cloud(Y=points_to_transform). This will apply the learned registration parameters to the point cloud points_to_transform and return the transformed point cloud.
For rigid and affine registrations the main parameter you can tweak is w. The w parameter is an indication of the amount of noise in the point clouds [0,1], by default it is set to 0 assuming no noise, but can be set at any value 0 <= w <1 with higher values indicating more noise.
For deformable registration, you can also tune alpha, beta, and use low_rank.
The alpha parameter (lambda in the original paper) identifies a tradeoff between making points align & regularization of the deformation. A higher value makes the deformation more rigid, a lower value makes the deformation more flexible.
The beta is the width of the Gaussian kernel used to regularize the deformation and thus identifies how far apart points should be to move them together (coherently). beta depends on the scale/size of your points cloud. Tuning beta can be simplified by normalizing the point cloud to a unit sphere distance.
The low_rank parameter is a boolean that indicates whether to use a regularized form of the deformation field. This further constrains the deformation, while vastly speeding up the optimization. num_eig is the number of eigenvalues to use in the low rank approximation. num_eig should be less than the number of points in the point cloud, the lower the smoother the deformation and the faster the optimization.
Tests can be run using pytest:
pip install pytest
pytestor
make dev
make testThe documentation can be built using pydoc3
make dev
make docContributions are welcome. Please see the guidelines outlined in the document: CONTRIBUTING.
We have adopted the code of conduct defined by the Contributor Covenant to clarify expected behavior in our community. For more information see the Code of Conduct.