Social-STGCNN: A Social Spatio-Temporal Graph Convolutional Neural Network for Human Trajectory Prediction
Read full paper here, Presented at CVPR 2020
Check our latest work in motion prediction with new metrics (ECCV2022): Social-Implicit https://github.com/abduallahmohamed/Social-Implicit

We propose the Social Spatio-Temporal Graph Convolutional Neural Network (Social-STGCNN), which models the problem of human trajectory prediction as a spatio-temporal graph. Our results show an improvement over the state of art by 20% on the Final Displacement Error (FDE) and an improvement on the Average Displacement Error (ADE) with 8.5 times less parameters and up to 48 times faster inference speed than previously reported methods. In addition, our model is data efficient, and exceeds previous state of the art on the ADE metric with only 20% of the training data. We propose a kernel function to embed the social interactions between pedestrians within the adjacency matrix.
Our model inference speed is 0.002s/frame (500Hz) using only 7.6K parameters.
You can cite our paper using:
@inproceedings{mohamed2020social,
title={Social-STGCNN: A Social Spatio-Temporal Graph Convolutional Neural Network for Human Trajectory Prediction},
author={Mohamed, Abduallah and Qian, Kun and Elhoseiny, Mohamed and Claudel, Christian},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={14424--14432},
year={2020}
}

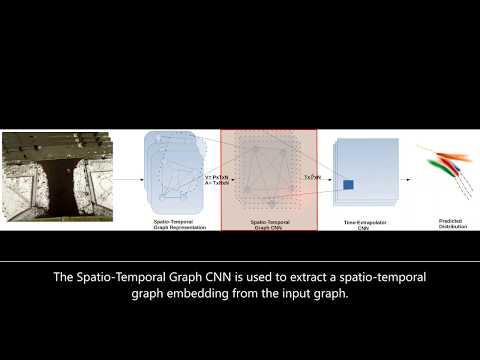
Social-STGCNN model consists of 2 building blocks:
1- ST-GCNN: A Spatio-Tempral Graph CNN that creates a spatio-temporal graph embedding representing the previous pedestrians trajectories.
2- TXP-CNN: A Time-Extrapolator CNN that utilizes the spatio-temporal graph embedding to predict future trajectories.
More details are in this description video:

The code was written using python 3.6. The following libraries are the minimal to run the code:
import pytorch
import networkx
import numpy
import tqdmor you can have everything set up by running:
pip install -r requirements.txtTo use the pretrained models at checkpoint/ and evaluate the models performance run:
test.pyTo train a model for each data set with the best configuration as in the paper, simply run:
./train.sh Please note: The initiation of training and testing might take a while as the code creates a cache to store the spatio-temporal graphs.
Exact CVPR version: https://github.com/abduallahmohamed/Social-STGCNN/tree/ebd57aaf34d84763825d05cf9d4eff738d8c96bb
























































































































