python tools/eval.py configs/fastbev/exp/paper/fastbev_m0_r18_s256x704_v200x200x4_c192_d2_f4.py --out temp_out/temp.pkl --eval bbox
later:
======
Loading NuScenes tables for version v1.0-mini...
23 category,
8 attribute,
4 visibility,
911 instance,
12 sensor,
120 calibrated_sensor,
31206 ego_pose,
8 log,
10 scene,
404 sample,
31206 sample_data,
18538 sample_annotation,
4 map,
Done loading in 0.376 seconds.
======
Reverse indexing ...
Done reverse indexing in 0.1 seconds.
======
lane thickness: 2
lane thickness: 2
lane thickness: 2
lane thickness: 2
lane thickness: 2
loading results from temp_out/temp.pkl
Start to convert detection format...
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 81/81, 18.6 task/s, elapsed: 4s, ETA: 0s
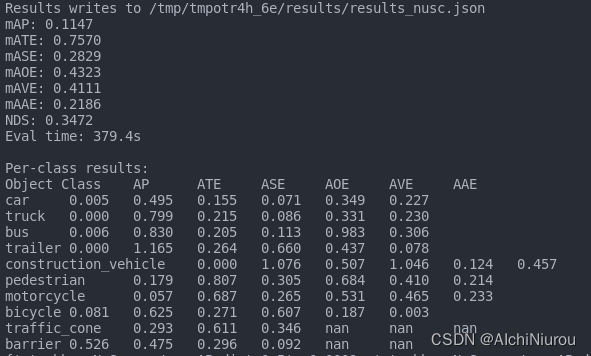
Results writes to /tmp/tmpow_oc5yk/results/results_nusc.json
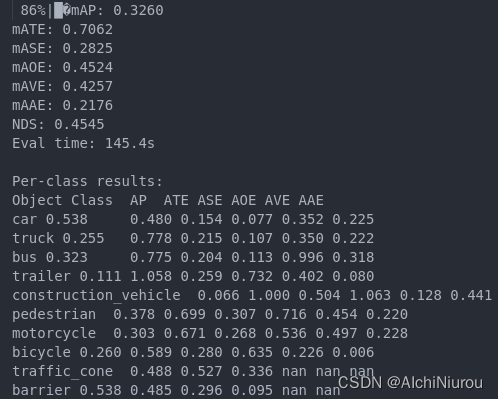
mAP: 0.0000
mATE: 1.0000
mASE: 1.0000
mAOE: 1.0000
mAVE: 1.0000
mAAE: 1.0000
NDS: 0.0000
Eval time: 1.0s
Per-class results:
Object Class AP ATE ASE AOE AVE AAE
car 0.000 1.000 1.000 1.000 1.000 1.000
truck 0.000 1.000 1.000 1.000 1.000 1.000
bus 0.000 1.000 1.000 1.000 1.000 1.000
trailer 0.000 1.000 1.000 1.000 1.000 1.000
construction_vehicle 0.000 1.000 1.000 1.000 1.000 1.000
pedestrian 0.000 1.000 1.000 1.000 1.000 1.000
motorcycle 0.000 1.000 1.000 1.000 1.000 1.000
bicycle 0.000 1.000 1.000 1.000 1.000 1.000
traffic_cone 0.000 1.000 1.000 nan nan nan
barrier 0.000 1.000 1.000 1.000 nan nan
{'pts_bbox_NuScenes/car_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/car_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/car_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/car_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/car_trans_err': 1.0, 'pts_bbox_NuScenes/car_scale_err': 1.0, 'pts_bbox_NuScenes/car_orient_err': 1.0, 'pts_bbox_NuScenes/car_vel_err': 1.0, 'pts_bbox_NuScenes/car_attr_err': 1.0, 'pts_bbox_NuScenes/mATE': 1.0, 'pts_bbox_NuScenes/mASE': 1.0, 'pts_bbox_NuScenes/mAOE': 1.0, 'pts_bbox_NuScenes/mAVE': 1.0, 'pts_bbox_NuScenes/mAAE': 1.0, 'pts_bbox_NuScenes/truck_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/truck_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/truck_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/truck_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/truck_trans_err': 1.0, 'pts_bbox_NuScenes/truck_scale_err': 1.0, 'pts_bbox_NuScenes/truck_orient_err': 1.0, 'pts_bbox_NuScenes/truck_vel_err': 1.0, 'pts_bbox_NuScenes/truck_attr_err': 1.0, 'pts_bbox_NuScenes/trailer_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/trailer_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/trailer_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/trailer_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/trailer_trans_err': 1.0, 'pts_bbox_NuScenes/trailer_scale_err': 1.0, 'pts_bbox_NuScenes/trailer_orient_err': 1.0, 'pts_bbox_NuScenes/trailer_vel_err': 1.0, 'pts_bbox_NuScenes/trailer_attr_err': 1.0, 'pts_bbox_NuScenes/bus_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/bus_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/bus_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/bus_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/bus_trans_err': 1.0, 'pts_bbox_NuScenes/bus_scale_err': 1.0, 'pts_bbox_NuScenes/bus_orient_err': 1.0, 'pts_bbox_NuScenes/bus_vel_err': 1.0, 'pts_bbox_NuScenes/bus_attr_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/construction_vehicle_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/construction_vehicle_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/construction_vehicle_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/construction_vehicle_trans_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_scale_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_orient_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_vel_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_attr_err': 1.0, 'pts_bbox_NuScenes/bicycle_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/bicycle_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/bicycle_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/bicycle_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/bicycle_trans_err': 1.0, 'pts_bbox_NuScenes/bicycle_scale_err': 1.0, 'pts_bbox_NuScenes/bicycle_orient_err': 1.0, 'pts_bbox_NuScenes/bicycle_vel_err': 1.0, 'pts_bbox_NuScenes/bicycle_attr_err': 1.0, 'pts_bbox_NuScenes/motorcycle_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/motorcycle_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/motorcycle_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/motorcycle_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/motorcycle_trans_err': 1.0, 'pts_bbox_NuScenes/motorcycle_scale_err': 1.0, 'pts_bbox_NuScenes/motorcycle_orient_err': 1.0, 'pts_bbox_NuScenes/motorcycle_vel_err': 1.0, 'pts_bbox_NuScenes/motorcycle_attr_err': 1.0, 'pts_bbox_NuScenes/pedestrian_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/pedestrian_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/pedestrian_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/pedestrian_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/pedestrian_trans_err': 1.0, 'pts_bbox_NuScenes/pedestrian_scale_err': 1.0, 'pts_bbox_NuScenes/pedestrian_orient_err': 1.0, 'pts_bbox_NuScenes/pedestrian_vel_err': 1.0, 'pts_bbox_NuScenes/pedestrian_attr_err': 1.0, 'pts_bbox_NuScenes/traffic_cone_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/traffic_cone_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/traffic_cone_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/traffic_cone_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/traffic_cone_trans_err': 1.0, 'pts_bbox_NuScenes/traffic_cone_scale_err': 1.0, 'pts_bbox_NuScenes/traffic_cone_orient_err': nan, 'pts_bbox_NuScenes/traffic_cone_vel_err': nan, 'pts_bbox_NuScenes/traffic_cone_attr_err': nan, 'pts_bbox_NuScenes/barrier_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/barrier_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/barrier_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/barrier_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/barrier_trans_err': 1.0, 'pts_bbox_NuScenes/barrier_scale_err': 1.0, 'pts_bbox_NuScenes/barrier_orient_err': 1.0, 'pts_bbox_NuScenes/barrier_vel_err': nan, 'pts_bbox_NuScenes/barrier_attr_err': nan, 'pts_bbox_NuScenes/NDS': 0.0, 'pts_bbox_NuScenes/mAP': 0.0}
{'pts_bbox_NuScenes/car_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/car_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/car_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/car_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/car_trans_err': 1.0, 'pts_bbox_NuScenes/car_scale_err': 1.0, 'pts_bbox_NuScenes/car_orient_err': 1.0, 'pts_bbox_NuScenes/car_vel_err': 1.0, 'pts_bbox_NuScenes/car_attr_err': 1.0, 'pts_bbox_NuScenes/mATE': 1.0, 'pts_bbox_NuScenes/mASE': 1.0, 'pts_bbox_NuScenes/mAOE': 1.0, 'pts_bbox_NuScenes/mAVE': 1.0, 'pts_bbox_NuScenes/mAAE': 1.0, 'pts_bbox_NuScenes/truck_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/truck_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/truck_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/truck_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/truck_trans_err': 1.0, 'pts_bbox_NuScenes/truck_scale_err': 1.0, 'pts_bbox_NuScenes/truck_orient_err': 1.0, 'pts_bbox_NuScenes/truck_vel_err': 1.0, 'pts_bbox_NuScenes/truck_attr_err': 1.0, 'pts_bbox_NuScenes/trailer_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/trailer_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/trailer_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/trailer_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/trailer_trans_err': 1.0, 'pts_bbox_NuScenes/trailer_scale_err': 1.0, 'pts_bbox_NuScenes/trailer_orient_err': 1.0, 'pts_bbox_NuScenes/trailer_vel_err': 1.0, 'pts_bbox_NuScenes/trailer_attr_err': 1.0, 'pts_bbox_NuScenes/bus_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/bus_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/bus_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/bus_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/bus_trans_err': 1.0, 'pts_bbox_NuScenes/bus_scale_err': 1.0, 'pts_bbox_NuScenes/bus_orient_err': 1.0, 'pts_bbox_NuScenes/bus_vel_err': 1.0, 'pts_bbox_NuScenes/bus_attr_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/construction_vehicle_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/construction_vehicle_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/construction_vehicle_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/construction_vehicle_trans_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_scale_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_orient_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_vel_err': 1.0, 'pts_bbox_NuScenes/construction_vehicle_attr_err': 1.0, 'pts_bbox_NuScenes/bicycle_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/bicycle_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/bicycle_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/bicycle_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/bicycle_trans_err': 1.0, 'pts_bbox_NuScenes/bicycle_scale_err': 1.0, 'pts_bbox_NuScenes/bicycle_orient_err': 1.0, 'pts_bbox_NuScenes/bicycle_vel_err': 1.0, 'pts_bbox_NuScenes/bicycle_attr_err': 1.0, 'pts_bbox_NuScenes/motorcycle_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/motorcycle_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/motorcycle_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/motorcycle_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/motorcycle_trans_err': 1.0, 'pts_bbox_NuScenes/motorcycle_scale_err': 1.0, 'pts_bbox_NuScenes/motorcycle_orient_err': 1.0, 'pts_bbox_NuScenes/motorcycle_vel_err': 1.0, 'pts_bbox_NuScenes/motorcycle_attr_err': 1.0, 'pts_bbox_NuScenes/pedestrian_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/pedestrian_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/pedestrian_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/pedestrian_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/pedestrian_trans_err': 1.0, 'pts_bbox_NuScenes/pedestrian_scale_err': 1.0, 'pts_bbox_NuScenes/pedestrian_orient_err': 1.0, 'pts_bbox_NuScenes/pedestrian_vel_err': 1.0, 'pts_bbox_NuScenes/pedestrian_attr_err': 1.0, 'pts_bbox_NuScenes/traffic_cone_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/traffic_cone_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/traffic_cone_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/traffic_cone_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/traffic_cone_trans_err': 1.0, 'pts_bbox_NuScenes/traffic_cone_scale_err': 1.0, 'pts_bbox_NuScenes/traffic_cone_orient_err': nan, 'pts_bbox_NuScenes/traffic_cone_vel_err': nan, 'pts_bbox_NuScenes/traffic_cone_attr_err': nan, 'pts_bbox_NuScenes/barrier_AP_dist_0.5': 0.0, 'pts_bbox_NuScenes/barrier_AP_dist_1.0': 0.0, 'pts_bbox_NuScenes/barrier_AP_dist_2.0': 0.0, 'pts_bbox_NuScenes/barrier_AP_dist_4.0': 0.0, 'pts_bbox_NuScenes/barrier_trans_err': 1.0, 'pts_bbox_NuScenes/barrier_scale_err': 1.0, 'pts_bbox_NuScenes/barrier_orient_err': 1.0, 'pts_bbox_NuScenes/barrier_vel_err': nan, 'pts_bbox_NuScenes/barrier_attr_err': nan, 'pts_bbox_NuScenes/NDS': 0.0, 'pts_bbox_NuScenes/mAP': 0.0}