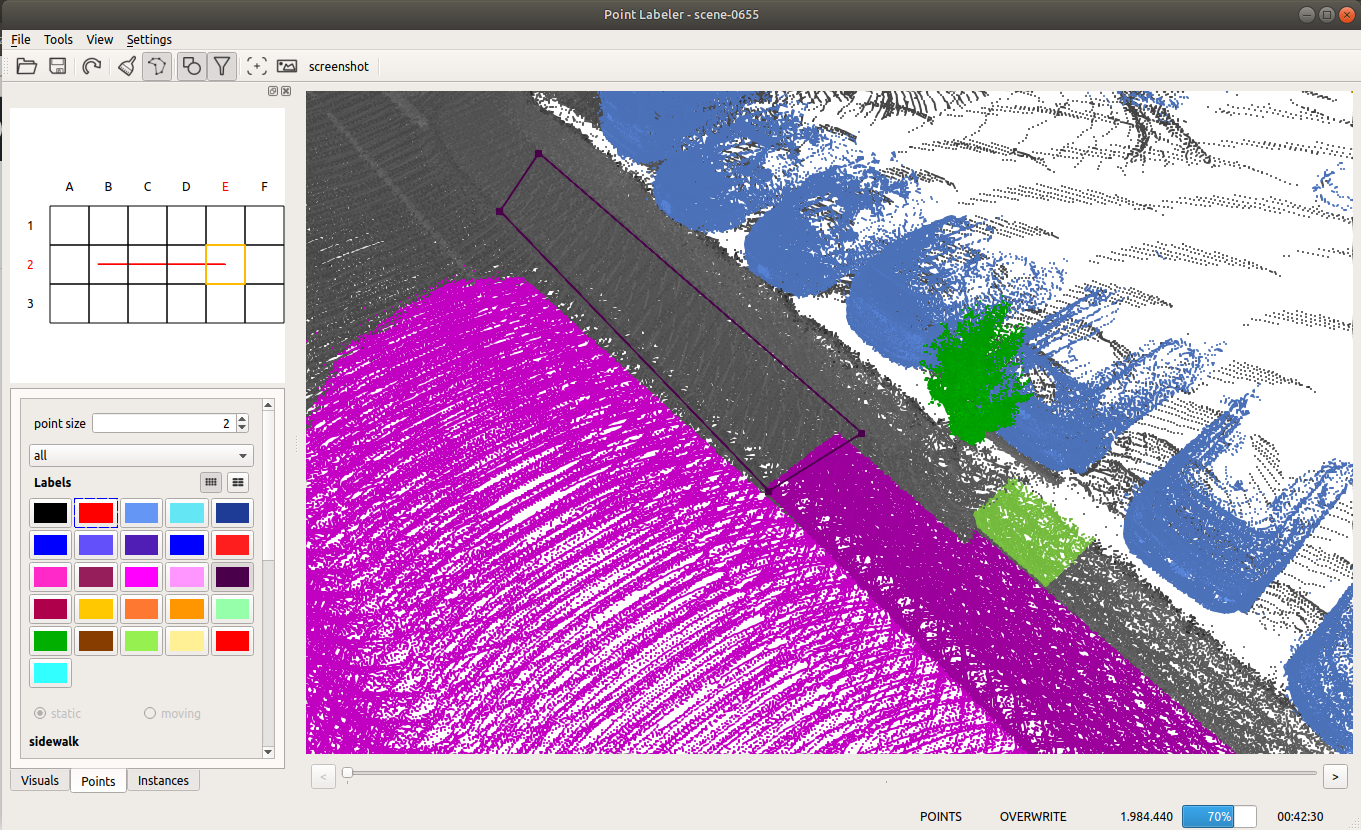
I upgraded some of my packages today and compiled the point labeler again the opengl view of point cloud was gone:
Start-Date: 2020-04-16 10:01:25
Commandline: aptdaemon role='role-commit-packages' sender=':1.691'
Install: libvulkan1:amd64 (1.1.73+dfsg-1~gpu16.04.1, automatic)
Upgrade: ros-kinetic-rviz-visual-tools:amd64 (3.6.0-0xenial-20200310-081255+0000, 3.6.0-0xenial-20200323-033116+0000), python-sip:amd64 (4.17+dfsg-1build1, 4.17+dfsg-1ubuntu0.1), python-sip-dev:amd64 (4.17+dfsg-1build1, 4.17+dfsg-1ubuntu0.1), python-rospkg-modules:amd64 (1.2.3-1, 1.2.4-1), ros-kinetic-desktop:amd64 (1.3.2-0xenial-20200229-054156+0000, 1.3.2-0xenial-20200323-230404+0000), sip-dev:amd64 (4.17+dfsg-1build1, 4.17+dfsg-1ubuntu0.1), ros-kinetic-robot-model:amd64 (1.12.11-0xenial-20200218-164238+0000, 1.12.11-0xenial-20200312-215420+0000), ros-kinetic-joint-state-publisher:amd64 (1.12.14-1xenial-20200122-144827+0000, 1.12.15-1xenial-20200312-213847+0000), python-rosdep:amd64 (0.18.0-1, 0.19.0-1), ros-kinetic-rviz-plugin-tutorials:amd64 (0.10.3-0xenial-20200228-233509+0000, 0.10.3-0xenial-20200323-033053+0000), ros-kinetic-rqt-rviz:amd64 (0.5.10-0xenial-20200229-052320+0000, 0.5.10-0xenial-20200323-033006+0000), ros-kinetic-desktop-full:amd64 (1.3.2-0xenial-20200229-054346+0000, 1.3.2-0xenial-20200323-230520+0000), ros-kinetic-viz:amd64 (1.3.2-0xenial-20200229-053840+0000, 1.3.2-0xenial-20200323-041109+0000), google-chrome-stable:amd64 (80.0.3987.149-1, 81.0.4044.113-1), ros-kinetic-grid-map-demos:amd64 (1.6.2-1xenial-20200310-083935+0000, 1.6.2-1xenial-20200323-040141+0000), procps:amd64 (2:3.3.10-4ubuntu2.4, 2:3.3.10-4ubuntu2.5), thunderbird-locale-zh-hans:amd64 (1:60.9.0+build1-0ubuntu0.16.04.2, 1:60.9.1+build1-0ubuntu0.16.04.1), ros-kinetic-perception:amd64 (1.3.2-0xenial-20200218-165054+0000, 1.3.2-0xenial-20200323-030857+0000), ros-kinetic-simulators:amd64 (1.3.2-0xenial-20200229-053829+0000, 1.3.2-0xenial-20200323-043047+0000), ros-kinetic-librviz-tutorial:amd64 (0.10.3-0xenial-20200228-233302+0000, 0.10.3-0xenial-20200323-032735+0000), libpq5:amd64 (9.5.19-0ubuntu0.16.04.1, 9.5.21-0ubuntu0.16.04.1), ros-kinetic-urdf-tutorial:amd64 (0.3.0-1xenial-20200228-233646+0000, 0.3.0-1xenial-20200323-033234+0000), libprocps4:amd64 (2:3.3.10-4ubuntu2.4, 2:3.3.10-4ubuntu2.5), ros-kinetic-jsk-rviz-plugins:amd64 (2.1.5-0xenial-20200310-080917+0000, 2.1.5-0xenial-20200323-032657+0000), ros-kinetic-laser-assembler:amd64 (1.7.4-0xenial-20200109-041936+0000, 1.7.4-0xenial-20200323-024956+0000), thunderbird-locale-zh-cn:amd64 (1:60.9.0+build1-0ubuntu0.16.04.2, 1:60.9.1+build1-0ubuntu0.16.04.1), python-rospkg:amd64 (1.2.3-100, 1.2.4-100), thunderbird-gnome-support:amd64 (1:60.9.0+build1-0ubuntu0.16.04.2, 1:60.9.1+build1-0ubuntu0.16.04.1), libpq-dev:amd64 (9.5.19-0ubuntu0.16.04.1, 9.5.21-0ubuntu0.16.04.1), wine-devel-i386:i386 (5.3~xenial, 5.6~xenial), python-rosdep-modules:amd64 (0.18.0-1, 0.19.0-1), ros-kinetic-laser-filters:amd64 (1.8.5-0xenial-20200109-041445+0000, 1.8.5-0xenial-20200323-025010+0000), ros-kinetic-grid-map:amd64 (1.6.2-1xenial-20200310-084730+0000, 1.6.2-1xenial-20200323-041026+0000), ros-kinetic-rviz-python-tutorial:amd64 (0.10.3-0xenial-20200228-233521+0000, 0.10.3-0xenial-20200323-033103+0000), thunderbird-locale-en-gb:amd64 (1:60.9.0+build1-0ubuntu0.16.04.2, 1:60.9.1+build1-0ubuntu0.16.04.1), thunderbird-locale-en-us:amd64 (1:60.9.0+build1-0ubuntu0.16.04.2, 1:60.9.1+build1-0ubuntu0.16.04.1), intel-psxe-common-doc-2020:amd64 (2020.0-088, 2020.1-102), ros-kinetic-robot:amd64 (1.3.2-0xenial-20200218-164944+0000, 1.3.2-0xenial-20200312-220643+0000), ros-kinetic-media-export:amd64 (0.2.0-0xenial-20191214-001322+0000, 0.3.0-1xenial-20200310-065508+0000), intel-mkl-doc-2020:amd64 (2020.0-166, 2020.1-217), ros-kinetic-rviz:amd64 (1.12.17-0xenial-20200228-225334+0000, 1.12.17-0xenial-20200323-025037+0000), thunderbird:amd64 (1:60.9.0+build1-0ubuntu0.16.04.2, 1:60.9.1+build1-0ubuntu0.16.04.1), intel-mkl-doc-ps-2020:amd64 (2020.0-166, 2020.1-217), ros-kinetic-laser-pipeline:amd64 (1.6.2-0xenial-20200109-042746+0000, 1.6.2-0xenial-20200323-025928+0000), ros-kinetic-rqt-robot-plugins:amd64 (0.5.7-0xenial-20200229-053355+0000, 0.5.7-0xenial-20200323-040554+0000), ros-kinetic-visualization-tutorials:amd64 (0.10.3-0xenial-20200228-235451+0000, 0.10.3-0xenial-20200323-230242+0000), thunderbird-locale-en:amd64 (1:60.9.0+build1-0ubuntu0.16.04.2, 1:60.9.1+build1-0ubuntu0.16.04.1), ros-kinetic-grid-map-rviz-plugin:amd64 (1.6.2-1xenial-20200310-080820+0000, 1.6.2-1xenial-20200323-032442+0000), ros-kinetic-laser-geometry:amd64 (1.6.4-0xenial-20200109-041019+0000, 1.6.5-1xenial-20200323-023751+0000)
End-Date: 2020-04-16 10:01:50
Not searching for unused variables given on the command line.
�[36m--�[0m The C compiler identification is GNU 5.4.0
�[36m--�[0m The CXX compiler identification is GNU 5.4.0
�[36m--�[0m Check for working C compiler: /usr/bin/cc
�[36m--�[0m Check for working C compiler: /usr/bin/cc -- works
�[36m--�[0m Detecting C compiler ABI info
�[36m--�[0m Detecting C compiler ABI info - done
�[36m--�[0m Detecting C compile features
�[36m--�[0m Detecting C compile features - done
�[36m--�[0m Check for working CXX compiler: /usr/bin/c++
�[36m--�[0m Check for working CXX compiler: /usr/bin/c++ -- works
�[36m--�[0m Detecting CXX compiler ABI info
�[36m--�[0m Detecting CXX compiler ABI info - done
�[36m--�[0m Detecting CXX compile features
�[36m--�[0m Detecting CXX compile features - done
�[36m--�[0m Found OpenGL: /usr/lib/x86_64-linux-gnu/libGL.so
�[36m--�[0m Found GLEW: /usr/include
�[36m--�[0m Boost version: 1.58.0
�[36m--�[0m Found the following Boost libraries:
�[36m--�[0m filesystem
�[36m--�[0m system
�[36m--�[0m Using CATKIN_DEVEL_PREFIX: /home/ran/catkin_ws/devel/.private/point_labeler
�[36m--�[0m Using CMAKE_PREFIX_PATH: /home/ran/catkin_ws/devel;/home/ran/kyber_ws/devel;/opt/ros/kinetic
�[36m--�[0m This workspace overlays: /home/ran/catkin_ws/devel;/home/ran/kyber_ws/devel;/opt/ros/kinetic
�[36m--�[0m Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.12", minimum required is "2")
�[36m--�[0m Using PYTHON_EXECUTABLE: /usr/bin/python2
�[36m--�[0m Using Debian Python package layout
�[36m--�[0m Using empy: /usr/bin/empy
�[36m--�[0m Using CATKIN_ENABLE_TESTING: ON
�[36m--�[0m Call enable_testing()
�[36m--�[0m Using CATKIN_TEST_RESULTS_DIR: /home/ran/catkin_ws/build/point_labeler/test_results
�[36m--�[0m Found gtest sources under '/usr/src/gmock': gtests will be built
�[36m--�[0m Found gmock sources under '/usr/src/gmock': gmock will be built
�[36m--�[0m Found PythonInterp: /usr/bin/python2 (found version "2.7.12")
�[36m--�[0m Looking for pthread.h
�[36m--�[0m Looking for pthread.h - found
�[36m--�[0m Looking for pthread_create
�[36m--�[0m Looking for pthread_create - not found
�[36m--�[0m Looking for pthread_create in pthreads
�[36m--�[0m Looking for pthread_create in pthreads - not found
�[36m--�[0m Looking for pthread_create in pthread
�[36m--�[0m Looking for pthread_create in pthread - found
�[36m--�[0m Found Threads: TRUE
�[36m--�[0m Using Python nosetests: /usr/bin/nosetests-2.7
�[36m--�[0m catkin 0.8.3
�[36m--�[0m BUILD_SHARED_LIBS is on
Found catkin
�[36m--�[0m Configuring done
�[36m--�[0m Generating done
�[36m--�[0m Build files have been written to: /home/ran/catkin_ws/build/point_labeler